Part Number: MSPM0G1507
Other Parts Discussed in Thread: LP-MSPM0G3507
Tool/software:
Dear TI Engineers,
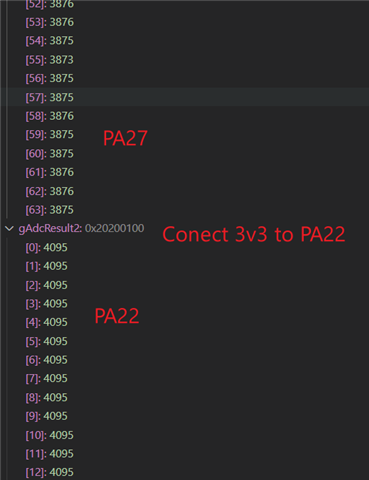
I hope this message finds you well. I am currently working on an ADC configuration based on the example "adc_singlechannel" (PA22 → ADC0, PA17 → ADC1 TI_driver). Initially, I had a 2-channel setup (ADC0 and ADC1), but I expanded ADC0 from 1 channel to 6 channels. However, I am encountering an issue where connecting 3.3V to PA22 affects all readings except for ADC0_3.
Here is the observed behavior:
When 3.3V is connected to PA22, all ADC readings are affected except for ADC0_3.
When 3.3V is connected to PA17, ADC0_3 shows a reading.
When 3.3V is connected to PA15, no effect is observed.
The pin-to-channel mapping is as follows:
A0_7→ PA22
A0_12 → PA14
A0_0 → PA27
A0_1 → PA26
A0_2 → PA25
A0_3 → PA24
A1_0 → PA15
Could you please provide guidance on why connecting 3.3V to PA22 affects all channels except ADC0_3? Additionally, why does connecting 3.3V to PA17 result in a reading for ADC0_3, while connecting to PA15 has no effect?
Thank you for your time and support. I look forward to your insights.
Best regards,
Pakho
void *adcSrvThread(void *arg) {
AdcSrv_Handle adcSrv; // ADC service handle
// Statistics for 6 ADC0 channels and 1 ADC1 channel
AdcSampleStats stats0; // ADC0 Channel 7 (A0_7 - AMP_ID)
AdcSampleStats stats0_12; // ADC0 Channel 12 (A0_12 - HW_ID)
AdcSampleStats stats0_0; // ADC0 Channel 0 (A0_0 - CH1_FET1_NTC)
AdcSampleStats stats0_1; // ADC0 Channel 1 (A0_1 - CH1_FET2_NTC)
AdcSampleStats stats0_2; // ADC0 Channel 2 (A0_2 - CH2_FET1_NTC)
AdcSampleStats stats0_3; // ADC0 Channel 3 (A0_3 - CH2_FET2_NTC)
AdcSampleStats stats1; // ADC1 Channel
// Initialize ADC service
if (AdcSrv_init(&adcSrv) != 0) {
LOG_PRINT_ERR("ADC service initialization failed");
return NULL;
}
LOG_PRINT_INF("ADC service started with 6 channels");
uint32_t cycle_count = 0;
while (1) {
// Clear statistics for all channels
memset(&stats0, 0, sizeof(AdcSampleStats));
memset(&stats0_12, 0, sizeof(AdcSampleStats));
memset(&stats0_0, 0, sizeof(AdcSampleStats));
memset(&stats0_1, 0, sizeof(AdcSampleStats));
memset(&stats0_2, 0, sizeof(AdcSampleStats));
memset(&stats0_3, 0, sizeof(AdcSampleStats));
memset(&stats1, 0, sizeof(AdcSampleStats));
// Perform ADC sampling cycle with correct parameter order
// Order: stats0 (A0_7), stats0_12 (A0_12), stats0_0 (A0_0), stats0_1 (A0_1), stats0_2 (A0_2), stats0_3 (A0_3), stats1 (ADC1)
if (AdcSrv_sampleCycle(&adcSrv, &stats0, &stats0_12, &stats0_0, &stats0_1, &stats0_2, &stats0_3, &stats1) != 0) {
break;
}
// Display results for all 6 ADC0 channels
if (stats0.avg > 0) {
LOG_PRINT_DBG("ADC0_7(AMP_ID)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0.min, stats0.max, stats0.avg,
(float)stats0.microvolts / 1000000.0f);
}
if (stats0_12.avg > 0) {
LOG_PRINT_DBG("ADC0_12(HW_ID)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0_12.min, stats0_12.max, stats0_12.avg,
(float)stats0_12.microvolts / 1000000.0f);
}
if (stats0_0.avg > 0) {
LOG_PRINT_DBG("ADC0_0(CH1_FET1_NTC)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0_0.min, stats0_0.max, stats0_0.avg,
(float)stats0_0.microvolts / 1000000.0f);
}
if (stats0_1.avg > 0) {
LOG_PRINT_DBG("ADC0_1(CH1_FET2_NTC)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0_1.min, stats0_1.max, stats0_1.avg,
(float)stats0_1.microvolts / 1000000.0f);
}
if (stats0_2.avg > 0) {
LOG_PRINT_DBG("ADC0_2(CH2_FET1_NTC)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0_2.min, stats0_2.max, stats0_2.avg,
(float)stats0_2.microvolts / 1000000.0f);
}
if (stats0_3.avg > 0) {
LOG_PRINT_DBG("ADC0_3(CH2_FET2_NTC)[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats0_3.min, stats0_3.max, stats0_3.avg,
(float)stats0_3.microvolts / 1000000.0f);
}
// Display results for ADC1 channel
if (stats1.avg > 0) {
LOG_PRINT_DBG("ADC1[%lu]: min=%d, max=%d, avg=%d (%.2f V)",
cycle_count, stats1.min, stats1.max, stats1.avg,
(float)stats1.microvolts / 1000000.0f);
}
LOG_PRINT_DBG("----------------------");
cycle_count++;
usleep(CYCLE_DELAY_MS * 1000);
}
// Cleanup ADC service
AdcSrv_close(&adcSrv);
return NULL;
}
/**
* @file AdcDrv.c
* @brief ADC Driver Implementation
*
* This file implements the low-level ADC driver functionality for dual-channel
* ADC operations. It provides initialization, reading, and cleanup operations
* for two ADC channels.
*/
#include "AdcDrv.h"
#include <ti/drivers/ADC.h>
#include "ti_drivers_config.h"
/**
* @brief Initialize ADC Driver
*
* Initializes all ADC channels with default parameters.
*
* @param handle Pointer to ADC driver handle structure
* @return 0 on success, negative error code on failure
*/
int AdcDrv_init(AdcDrv_Handle *handle) {
ADC_Params params;
ADC_Params_init(¶ms);
// Initialize ADC0 channels
handle->adc0 = ADC_open(CONFIG_ADC_0, ¶ms); // A0_7 (AMP_ID)
if (handle->adc0 == NULL) {
return -1; // ADC0 initialization failed
}
// Initialize additional ADC0 channels
handle->adc0_12 = ADC_open(CONFIG_ADC_2, ¶ms); // A0_12 (HW_ID)
if (handle->adc0_12 == NULL) {
AdcDrv_close(handle);
return -2; // ADC0_12 initialization failed
}
handle->adc0_0 = ADC_open(CONFIG_ADC_3, ¶ms); // A0_0 (CH1_FET1_NTC)
if (handle->adc0_0 == NULL) {
AdcDrv_close(handle);
return -3; // ADC0_0 initialization failed
}
handle->adc0_1 = ADC_open(CONFIG_ADC_4, ¶ms); // A0_1 (CH1_FET2_NTC)
if (handle->adc0_1 == NULL) {
AdcDrv_close(handle);
return -4; // ADC0_1 initialization failed
}
handle->adc0_2 = ADC_open(CONFIG_ADC_5, ¶ms); // A0_2 (CH2_FET1_NTC)
if (handle->adc0_2 == NULL) {
AdcDrv_close(handle);
return -5; // ADC0_2 initialization failed
}
handle->adc0_3 = ADC_open(CONFIG_ADC_6, ¶ms); // A0_3 (CH2_FET2_NTC)
if (handle->adc0_3 == NULL) {
AdcDrv_close(handle);
return -6; // ADC0_3 initialization failed
}
// Initialize ADC1 channel
handle->adc1 = ADC_open(CONFIG_ADC_1, ¶ms);
if (handle->adc1 == NULL) {
AdcDrv_close(handle);
return -7; // ADC1 initialization failed
}
return 0; // Success
}
/**
* @brief Read from ADC Channel 0
*
* Performs a single conversion on ADC channel 0 and returns the result.
* Checks if the ADC handle is valid before conversion.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the ADC conversion result
* @return 0 on success, -1 if ADC handle is invalid
*/
int AdcDrv_readChannel0(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0 == NULL) return -1;
return ADC_convert(handle->adc0, value);
}
/**
* @brief Read ADC Channel 1
*
* Reads the value from ADC channel 1. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel1(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc1 == NULL) return -1;
return ADC_convert(handle->adc1, value);
}
/**
* @brief Read ADC0 Channel 12 (HW_ID)
*
* Reads the value from ADC0 channel 12. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel0_12(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0_12 == NULL) return -1;
return ADC_convert(handle->adc0_12, value);
}
/**
* @brief Read ADC0 Channel 0 (CH1_FET1_NTC)
*
* Reads the value from ADC0 channel 0. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel0_0(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0_0 == NULL) return -1;
return ADC_convert(handle->adc0_0, value);
}
/**
* @brief Read ADC0 Channel 1 (CH1_FET2_NTC)
*
* Reads the value from ADC0 channel 1. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel0_1(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0_1 == NULL) return -1;
return ADC_convert(handle->adc0_1, value);
}
/**
* @brief Read ADC0 Channel 2 (CH2_FET1_NTC)
*
* Reads the value from ADC0 channel 2. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel0_2(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0_2 == NULL) return -1;
return ADC_convert(handle->adc0_2, value);
}
/**
* @brief Read ADC0 Channel 3 (CH2_FET2_NTC)
*
* Reads the value from ADC0 channel 3. If the conversion fails, it returns -1.
*
* @param handle Pointer to ADC driver handle structure
* @param value Pointer to store the read ADC value
* @return 0 on success, -1 on failure
*/
int AdcDrv_readChannel0_3(AdcDrv_Handle *handle, uint16_t *value) {
if (handle->adc0_3 == NULL) return -1;
return ADC_convert(handle->adc0_3, value);
}
/**
* @brief Close ADC Driver
*
* Closes all ADC channels and cleans up their resources. Sets the handles
* to NULL after closing to prevent accidental reuse.
*
* @param handle Pointer to ADC driver handle structure
*/
void AdcDrv_close(AdcDrv_Handle *handle) {
// Close all ADC0 channels if they exist
if (handle->adc0) {
ADC_close(handle->adc0);
handle->adc0 = NULL;
}
if (handle->adc0_12) {
ADC_close(handle->adc0_12);
handle->adc0_12 = NULL;
}
if (handle->adc0_0) {
ADC_close(handle->adc0_0);
handle->adc0_0 = NULL;
}
if (handle->adc0_1) {
ADC_close(handle->adc0_1);
handle->adc0_1 = NULL;
}
if (handle->adc0_2) {
ADC_close(handle->adc0_2);
handle->adc0_2 = NULL;
}
if (handle->adc0_3) {
ADC_close(handle->adc0_3);
handle->adc0_3 = NULL;
}
// Close ADC1 channel if it exists
if (handle->adc1) {
ADC_close(handle->adc1);
handle->adc1 = NULL;
}
}
/**
* @file AdcSrv.c
* @brief ADC Service Implementation
*
* This file implements the ADC service layer that provides high-level ADC
* functionality including multi-channel sampling and statistical analysis.
* It uses the low-level ADC driver for actual ADC operations.
*/
#include "AdcSrv.h"
#include "AdcDrv.h"
#include <unistd.h>
/**
* @brief Sampling delay in microseconds
*
* Defines the delay between consecutive ADC samples to allow proper
* signal settling and prevent ADC overload.
*/
#define SAMPLE_DELAY_US 10000
/**
* @brief Number of samples per channel per cycle
*
* Defines how many samples to take from each ADC channel in one
* sampling cycle for statistical analysis.
*/
#define SAMPLE_COUNT 5
/**
* @brief Static ADC driver instance
*
* This structure maintains the state of the underlying ADC driver
* and is used by all ADC service operations.
*/
static AdcDrv_Handle adcDrv;
/**
* @brief Initialize ADC Service
*
* Initializes the ADC service by setting up the service handle and
* initializing the underlying ADC driver. The service is marked as
* running and configured with the default sample count.
*
* @param handle Pointer to ADC service handle structure
* @return 0 on success, negative error code on failure
*/
int AdcSrv_init(AdcSrv_Handle *handle) {
// Set initial service state
handle->running = true;
handle->sample_count = SAMPLE_COUNT;
// Initialize underlying ADC driver
int ret = AdcDrv_init(&adcDrv);
if (ret != 0) {
return ret; // Propagate error code
}
return 0; // Success
}
/**
* @brief Execute Single Sampling Cycle
*
* Performs a complete sampling cycle on all ADC channels, collecting
* multiple samples from each channel and calculating statistical data
* (min, max, average) for each channel.
*
* @param handle Pointer to ADC service handle structure
* @param stats0 Pointer to statistics structure for ADC0 channel 7 (AMP_ID)
* @param stats0_12 Pointer to statistics structure for ADC0 channel 12 (HW_ID)
* @param stats0_0 Pointer to statistics structure for ADC0 channel 0 (CH1_FET1_NTC)
* @param stats0_1 Pointer to statistics structure for ADC0 channel 1 (CH1_FET2_NTC)
* @param stats0_2 Pointer to statistics structure for ADC0 channel 2 (CH2_FET1_NTC)
* @param stats0_3 Pointer to statistics structure for ADC0 channel 3 (CH2_FET2_NTC)
* @param stats1 Pointer to statistics structure for ADC1 channel
* @return 0 on success, -1 if service is not running, -2 if invalid parameters
*/
int AdcSrv_sampleCycle(AdcSrv_Handle *handle,
AdcSampleStats *stats0,
AdcSampleStats *stats0_12,
AdcSampleStats *stats0_0,
AdcSampleStats *stats0_1,
AdcSampleStats *stats0_2,
AdcSampleStats *stats0_3,
AdcSampleStats *stats1) {
// Check if service is running
if (!handle->running) return -1;
// Validate input parameters
if (handle == NULL || stats0 == NULL || stats0_12 == NULL || stats0_0 == NULL ||
stats0_1 == NULL || stats0_2 == NULL || stats0_3 == NULL || stats1 == NULL) {
return -2; // Invalid input parameters
}
// Initialize statistics variables
uint16_t min0 = 0xFFFF, max0 = 0, sum0 = 0;
uint16_t min0_12 = 0xFFFF, max0_12 = 0, sum0_12 = 0;
uint16_t min0_0 = 0xFFFF, max0_0 = 0, sum0_0 = 0;
uint16_t min0_1 = 0xFFFF, max0_1 = 0, sum0_1 = 0;
uint16_t min0_2 = 0xFFFF, max0_2 = 0, sum0_2 = 0;
uint16_t min0_3 = 0xFFFF, max0_3 = 0, sum0_3 = 0;
uint16_t min1 = 0xFFFF, max1 = 0, sum1 = 0;
int samples0 = 0, samples0_12 = 0, samples0_0 = 0, samples0_1 = 0, samples0_2 = 0, samples0_3 = 0, samples1 = 0;
// Collect samples from all channels
for (int i = 0; i < handle->sample_count; i++) {
uint16_t val;
int res;
// Sample from channel 0 (A0_7 - AMP_ID)
res = AdcDrv_readChannel0(&adcDrv, &val);
if (res == 0) {
// Update channel 0 statistics
if (val < min0) min0 = val;
if (val > max0) max0 = val;
sum0 += val;
samples0++;
}
// Sample from channel 0_12 (A0_12 - HW_ID)
res = AdcDrv_readChannel0_12(&adcDrv, &val);
if (res == 0) {
// Update channel 0_12 statistics
if (val < min0_12) min0_12 = val;
if (val > max0_12) max0_12 = val;
sum0_12 += val;
samples0_12++;
}
// Sample from channel 0_0 (A0_0 - CH1_FET1_NTC)
res = AdcDrv_readChannel0_0(&adcDrv, &val);
if (res == 0) {
// Update channel 0_0 statistics
if (val < min0_0) min0_0 = val;
if (val > max0_0) max0_0 = val;
sum0_0 += val;
samples0_0++;
}
// Sample from channel 0_1 (A0_1 - CH1_FET2_NTC)
res = AdcDrv_readChannel0_1(&adcDrv, &val);
if (res == 0) {
// Update channel 0_1 statistics
if (val < min0_1) min0_1 = val;
if (val > max0_1) max0_1 = val;
sum0_1 += val;
samples0_1++;
}
// Sample from channel 0_2 (A0_2 - CH2_FET1_NTC)
res = AdcDrv_readChannel0_2(&adcDrv, &val);
if (res == 0) {
// Update channel 0_2 statistics
if (val < min0_2) min0_2 = val;
if (val > max0_2) max0_2 = val;
sum0_2 += val;
samples0_2++;
}
// Sample from channel 0_3 (A0_3 - CH2_FET2_NTC)
res = AdcDrv_readChannel0_3(&adcDrv, &val);
if (res == 0) {
// Update channel 0_3 statistics
if (val < min0_3) min0_3 = val;
if (val > max0_3) max0_3 = val;
sum0_3 += val;
samples0_3++;
}
// Sample from channel 1
res = AdcDrv_readChannel1(&adcDrv, &val);
if (res == 0) {
// Update channel 1 statistics
if (val < min1) min1 = val;
if (val > max1) max1 = val;
sum1 += val;
samples1++;
}
// Delay between samples
usleep(SAMPLE_DELAY_US);
}
// Calculate and store channel 0 statistics
if (samples0 > 0) {
stats0->min = min0;
stats0->max = max0;
stats0->avg = sum0 / samples0;
stats0->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0, stats0->avg);
}
// Calculate and store channel 0_12 statistics
if (samples0_12 > 0) {
stats0_12->min = min0_12;
stats0_12->max = max0_12;
stats0_12->avg = sum0_12 / samples0_12;
stats0_12->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0_12, stats0_12->avg);
}
// Calculate and store channel 0_0 statistics
if (samples0_0 > 0) {
stats0_0->min = min0_0;
stats0_0->max = max0_0;
stats0_0->avg = sum0_0 / samples0_0;
stats0_0->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0_0, stats0_0->avg);
}
// Calculate and store channel 0_1 statistics
if (samples0_1 > 0) {
stats0_1->min = min0_1;
stats0_1->max = max0_1;
stats0_1->avg = sum0_1 / samples0_1;
stats0_1->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0_1, stats0_1->avg);
}
// Calculate and store channel 0_2 statistics
if (samples0_2 > 0) {
stats0_2->min = min0_2;
stats0_2->max = max0_2;
stats0_2->avg = sum0_2 / samples0_2;
stats0_2->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0_2, stats0_2->avg);
}
// Calculate and store channel 0_3 statistics
if (samples0_3 > 0) {
stats0_3->min = min0_3;
stats0_3->max = max0_3;
stats0_3->avg = sum0_3 / samples0_3;
stats0_3->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc0_3, stats0_3->avg);
}
// Calculate and store channel 1 statistics
if (samples1 > 0) {
stats1->min = min1;
stats1->max = max1;
stats1->avg = sum1 / samples1;
stats1->microvolts = ADC_convertRawToMicroVolts(adcDrv.adc1, stats1->avg);
}
return 0;
}
/**
* @brief Close ADC Service
*
* Stops the ADC service and cleans up resources by marking the service
* as not running and closing the underlying ADC driver.
*
* @param handle Pointer to ADC service handle structure
*/
void AdcSrv_close(AdcSrv_Handle *handle) {
// Mark service as stopped
handle->running = false;
// Clean up underlying driver resources
AdcDrv_close(&adcDrv);
}
/*
* Copyright (c) 2023, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== ti_drivers_config.c ========
* Configured TI-Drivers module definitions
*/
#include <stddef.h>
#include <stdint.h>
#include <ti/devices/DeviceFamily.h>
#include "ti_drivers_config.h"
/*
* ============================= Display =============================
*/
#include <ti/display/Display.h>
#include <ti/display/DisplayUart.h>
#define CONFIG_Display_COUNT 1
const uint_least8_t CONFIG_UART_0 = 0;
const uint_least8_t CONFIG_UART_1 = 1;
const uint_least8_t UART_count = CONFIG_UART_COUNT;
#define DISPLAY_UARTBUFFERSIZE 100
static char displayUARTBuffer[DISPLAY_UARTBUFFERSIZE];
DisplayUart_Object displayUartObject;
const DisplayUart_HWAttrs displayUartHWAttrs = {.uartIdx = CONFIG_UART_1,
.baudRate = 115200,
.mutexTimeout = (unsigned int) (-1),
.strBuf = displayUARTBuffer,
.strBufLen = DISPLAY_UARTBUFFERSIZE};
const Display_Config Display_config[CONFIG_Display_COUNT] = {
/* CONFIG_Display_0 */
/* XDS110 UART */
{.fxnTablePtr = &DisplayUartMin_fxnTable,
.object = &displayUartObject,
.hwAttrs = &displayUartHWAttrs},
};
const uint_least8_t Display_count = CONFIG_Display_COUNT;
/*
* =============================== DMA ===============================
*/
#include <ti/drivers/dma/DMAMSPM0.h>
const uint_least8_t CONFIG_DMA_0 = 0;
const uint_least8_t DMA_Count = CONFIG_DMA_COUNT;
DMAMSPM0_Object DMAObject[CONFIG_DMA_CH_COUNT] = {
{.dmaTransfer =
{
.rxTrigger = DMA_UART0_RX_TRIG,
.rxTriggerType = DL_DMA_TRIGGER_TYPE_EXTERNAL,
.transferMode = DL_DMA_SINGLE_TRANSFER_MODE,
.extendedMode = DL_DMA_NORMAL_MODE,
.destWidth = DL_DMA_WIDTH_BYTE,
.srcWidth = DL_DMA_WIDTH_BYTE,
.destIncrement = DL_DMA_ADDR_INCREMENT,
.dmaChannel = 0,
.dmaTransferSource = NULL,
.dmaTransferDestination = NULL,
.enableDMAISR = false,
}},
};
static const DMAMSPM0_HWAttrs DMAMSP0HWAttrs[CONFIG_DMA_COUNT] = {
{
.dmaIsrFxn = NULL,
.intPriority = DEFAULT_DMA_PRIORITY,
.roundRobinPriority = 0,
},
};
const DMAMSPM0_Cfg DMAMSPM0_Config[CONFIG_DMA_COUNT] = {
{
&DMAMSP0HWAttrs[CONFIG_DMA_0],
&DMAObject[CONFIG_DMA_0],
},
};
/*
* =============================== GPIO ===============================
*/
#include <ti/drivers/GPIO.h>
#include <ti/drivers/gpio/GPIOMSPM0.h>
/* The range of pins available on this device */
const uint_least8_t GPIO_pinLowerBound = 0;
const uint_least8_t GPIO_pinUpperBound = 60;
/*
* ======== gpioPinConfigs ========
* Array of Pin configurations
*/
GPIO_PinConfig gpioPinConfigs[60] = {
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA0 - I2C SDA */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA1 - I2C SCL */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA2 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA3 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA4 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA5 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA6 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA7 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA8 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA9 */
GPIO_CFG_OUTPUT | GPIO_CFG_OUT_HIGH, /* PA10:CONFIG_GPIO_UART2_0_TX */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_PD, /* PA11:CONFIG_GPIO_UART2_0_RX */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA12 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA13 */
/* Owned by CONFIG_ADC_0, channel 12 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA14:CONFIG_GPIO_ADC_0_AIN12 (HW_ID) */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA15 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA16 */
/* Owned by CONFIG_ADC_1, channel 2 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA17:CONFIG_GPIO_ADC_1_AIN */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA18 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA19 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA20 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA21 */
/* Owned by CONFIG_ADC_0, channel 7 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA22:CONFIG_GPIO_ADC_0_AIN7 (AMP_ID) */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA23 */
/* Owned by CONFIG_ADC_0, channel 3 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA24:CONFIG_GPIO_ADC_0_AIN3 (CH2_FET2_NTC) */
/* Owned by CONFIG_ADC_0, channel 2 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA25:CONFIG_GPIO_ADC_0_AIN2 (CH2_FET1_NTC) */
/* Owned by CONFIG_ADC_0, channel 1 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA26:CONFIG_GPIO_ADC_0_AIN1 (CH1_FET2_NTC) */
/* Owned by CONFIG_ADC_0, channel 0 as ADC Pin */
GPIO_CFG_INPUT | GPIO_CFG_IN_INT_NONE |
GPIO_CFG_IN_NOPULL, /* PA27:CONFIG_GPIO_ADC_0_AIN0 (CH1_FET1_NTC) */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA28 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA29 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA30 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PA31 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB0 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB1 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB2 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB3 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB4 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB5 */
GPIO_CFG_OUT_STD | GPIO_CFG_OUT_HIGH | IOMUX_PINCM23,/* PB6 - AMP_RST */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB7 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB8 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB9 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB10 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB11 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB12 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB13 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB14 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB15 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB16 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB17 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB18 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB19 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB20 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB21 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB22 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB23 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB24 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB25 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB26 */
GPIO_CFG_INPUT | GPIO_DO_NOT_CONFIG, /* PB27 */
};
/*
* ======== gpioCallbackFunctions ========
* Array of callback function pointers
* Change at runtime with GPIO_setCallback()
*/
GPIO_CallbackFxn gpioCallbackFunctions[60];
/*
* ======== gpioUserArgs ========
* Array of user argument pointers
* Change at runtime with GPIO_setUserArg()
* Get values with GPIO_getUserArg()
*/
void *gpioUserArgs[60];
const uint_least8_t CONFIG_GPIO_LED_0_CONST = CONFIG_GPIO_LED_0;
const uint_least8_t CONFIG_GPIO_ADC_0_AIN_CONST = CONFIG_GPIO_ADC_0_AIN;
const uint_least8_t CONFIG_GPIO_ADC_1_AIN_CONST = CONFIG_GPIO_ADC_1_AIN;
const uint_least8_t CONFIG_GPIO_UART_0_TX_CONST = CONFIG_GPIO_UART_0_TX;
const uint_least8_t CONFIG_GPIO_UART_0_RX_CONST = CONFIG_GPIO_UART_0_RX;
const uint_least8_t CONFIG_I2C_CONTROLLER_CONST = CONFIG_I2C_0;
/*
* ======== GPIO_config ========
*/
const GPIO_Config GPIO_config = {.configs = (GPIO_PinConfig *) gpioPinConfigs,
.callbacks = (GPIO_CallbackFxn *) gpioCallbackFunctions,
.userArgs = gpioUserArgs,
.intPriority = (~0)};
/*
* =============================== I2C Controller ===============================
*/
#include <ti/drivers/I2C.h>
#include <ti/drivers/i2c/I2CMSPM0.h>
#define CONFIG_I2C_COUNT 1
/*
* ======== i2cObjects ========
*/
I2CMSPM0_Object I2CMSPM0Objects[CONFIG_I2C_COUNT];
/*
* ======== i2cHWAttrs ========
*/
const I2CMSPM0_HWAttrs I2CMSPM0HWAttrs[CONFIG_I2C_COUNT] = {
/* CONFIG_I2C_CONTROLLER */
/* LaunchPad I2C */
{
.i2c = I2C_INST,
.intNum = I2C_INST_INT_IRQN,
.intPriority = (~0),
.sdaPincm = GPIO_I2C_IOMUX_SDA,
.sdaPinIndex = GPIO_I2C_SDA_PIN,
.sdaPinMux = GPIO_I2C_IOMUX_SDA_FUNC,
.sclPincm = GPIO_I2C_IOMUX_SCL,
.sclPinIndex = GPIO_I2C_SCL_PIN,
.sclPinMux = GPIO_I2C_IOMUX_SCL_FUNC,
.clockSource = DL_I2C_CLOCK_BUSCLK,
.clockDivider = DL_I2C_CLOCK_DIVIDE_1,
.txIntFifoThr = DL_I2C_TX_FIFO_LEVEL_BYTES_1,
.rxIntFifoThr = DL_I2C_RX_FIFO_LEVEL_BYTES_1,
.isClockStretchingEnabled = true,
.i2cClk = I2C_CLOCK_MHZ,
},
};
/*
* ======== I2C_config ========
*/
const I2C_Config I2C_config[CONFIG_I2C_COUNT] = {
/* CONFIG_I2C_CONTROLLER */
/* LaunchPad I2C */
{.object = &I2CMSPM0Objects[CONFIG_I2C_0],
.hwAttrs = &I2CMSPM0HWAttrs[CONFIG_I2C_0]},
};
const uint_least8_t CONFIG_I2C_CONST = CONFIG_I2C_0;
const uint_least8_t I2C_count = CONFIG_I2C_COUNT;
/*
* =============================== ADC ===============================
*/
#include <ti/drivers/ADC.h>
#include <ti/drivers/adc/ADCMSPM0.h>
#define CONFIG_ADC_COUNT 8 // 1个ADC0实例 + 1个ADC1实例 + 6个ADC0通道
/*
* ======== adcMSPM0Objects ========
*/
ADCMSPM0_Object adcObjects[CONFIG_ADC_COUNT];
/*
* ======== adcMSPM0HWAttrs ========
*/
const ADCMSPM0_HWAttrs adcHWAttrs[CONFIG_ADC_COUNT] = {
/* CONFIG_ADC_0 - Main ADC0 instance (A0_7 - AMP_ID) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN7,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN7_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN7_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 7,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* ADC0 Channel 2 - A0_12 (HW_ID) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN12,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN12_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN12_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 12,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* ADC0 Channel 3 - A0_0 (CH1_FET1_NTC) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN0,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN0_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN0_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 0,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* ADC0 Channel 4 - A0_1 (CH1_FET2_NTC) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN1,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN1_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN1_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 1,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* ADC0 Channel 5 - A0_2 (CH2_FET1_NTC) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN2,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN2_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN2_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 2,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* ADC0 Channel 6 - A0_3 (CH2_FET2_NTC) */
{.adc = ADC_0_INST,
.adcInputDIO = CONFIG_GPIO_ADC_0_AIN3,
.adcInputPincm = CONFIG_GPIO_ADC_0_AIN3_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_0_AIN3_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 3,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_ULPCLK,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* CONFIG_ADC_1 */
{.adc = ADC_1_INST,
.adcInputDIO = CONFIG_GPIO_ADC_1_AIN,
.adcInputPincm = CONFIG_GPIO_ADC_1_AIN_PINCM,
.adcInputPinMux = CONFIG_GPIO_ADC_1_AIN_PINMUX,
.adcPosRefDIO = GPIO_INVALID_INDEX,
.adcNegRefDIO = GPIO_INVALID_INDEX,
.adcChannel = 2,
.refSource = ADCMSPM0_VDDA_REFERENCE,
.samplingDuration = 16,
.refVoltage = 3300000, /* uV */
.resolutionBits = ADCMSPM0_RESOLUTION_12_BIT,
.adcClkkDivider = ADCMSPM0_CLKDIV_8,
.adcClkSelect = ADCMSPM0_CLK_SYSOSC,
.adcClkFreqRange = ADCMSPM0_CLK_FREQ_RANGE_24TO32,
.conversionMode = ADCMSPM0_SINGLE_CH_SINGLE_CONV,
.conversionStartAddr = 0,
.conversionEndAddr = 0,
.repeatConversionMode = ADCMSPM0_REPEAT_MODE_ENABLED,
.samplingMode = ADCMSPM0_SAMPLING_MODE_AUTO,
.sampleTrigger = ADCMSPM0_SAMPLING_TRIG_SW,
.conversionDataFormat = ADCMSPM0_CONV_DATA_FORMAT_UNSIGNED,
.sampleTimerSrc = ADCMSPM0_SAMP_TMR_SOURCE_SCOMP0,
.conversionTrigger = ADCMSPM0_NEXT_CONV_WITH_TRIG,
.adcHWAveraging = ADCMSPM0_HW_AVG_DISABLED,
.idxMEMCTLx = 0},
/* Additional ADC0 Channels */
};
/*
* ======== ADC_config ========
*/
const ADC_Config ADC_config[CONFIG_ADC_COUNT] = {
/* CONFIG_ADC_0 - Main ADC0 instance (A0_7 - AMP_ID) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_0],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_0]},
/* CONFIG_ADC_1 */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_1],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_1]},
/* Additional ADC0 Channels */
/* CONFIG_ADC_2 - A0_12 (HW_ID) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_2],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_2]},
/* CONFIG_ADC_3 - A0_0 (CH1_FET1_NTC) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_3],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_3]},
/* CONFIG_ADC_4 - A0_1 (CH1_FET2_NTC) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_4],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_4]},
/* CONFIG_ADC_5 - A0_2 (CH2_FET1_NTC) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_5],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_5]},
/* CONFIG_ADC_6 - A0_3 (CH2_FET2_NTC) */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_6],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_6]},
/* CONFIG_ADC_7 - Additional ADC0 channel placeholder */
{.fxnTablePtr = &ADCMSPM0_fxnTable,
.object = &adcObjects[CONFIG_ADC_7],
.hwAttrs = &adcHWAttrs[CONFIG_ADC_7]},
};
const uint_least8_t CONFIG_ADC_0_CONST = CONFIG_ADC_0;
const uint_least8_t CONFIG_ADC_1_CONST = CONFIG_ADC_1;
const uint_least8_t CONFIG_ADC_2_CONST = CONFIG_ADC_2;
const uint_least8_t CONFIG_ADC_3_CONST = CONFIG_ADC_3;
const uint_least8_t CONFIG_ADC_4_CONST = CONFIG_ADC_4;
const uint_least8_t CONFIG_ADC_5_CONST = CONFIG_ADC_5;
const uint_least8_t CONFIG_ADC_6_CONST = CONFIG_ADC_6;
const uint_least8_t CONFIG_ADC_7_CONST = CONFIG_ADC_7;
const uint_least8_t ADC_count = CONFIG_ADC_COUNT;
/*
* =============================== UART0 ===============================
*/
#include <ti/drivers/uart/UARTMSPM0.h>
static const UARTMSP_HWAttrs UARTMSPHWAttrs[CONFIG_UART_COUNT] = {
{
.regs = UART0,
.irq = UART0_INT_IRQn,
.rxPin = IOMUX_PINCM22, /* PA11 */
.rxPinFunction = IOMUX_PINCM22_PF_UART0_RX,
.txPin = IOMUX_PINCM21, /* PA10 */
.txPinFunction = IOMUX_PINCM21_PF_UART0_TX,
.mode = DL_UART_MODE_NORMAL,
.direction = DL_UART_DIRECTION_TX_RX,
.flowControl = DL_UART_FLOW_CONTROL_NONE,
.clockSource = DL_UART_CLOCK_BUSCLK,
.clockDivider = DL_UART_CLOCK_DIVIDE_RATIO_4,
.rxIntFifoThr = DL_UART_RX_FIFO_LEVEL_ONE_ENTRY,
.txIntFifoThr = DL_UART_TX_FIFO_LEVEL_EMPTY,
},
{
.regs = UART1,
.irq = UART1_INT_IRQn,
.rxPin = IOMUX_PINCM20, /* PA9 */
.rxPinFunction = IOMUX_PINCM20_PF_UART1_RX,
.txPin = IOMUX_PINCM19, /* PA8 */
.txPinFunction = IOMUX_PINCM19_PF_UART1_TX,
.mode = DL_UART_MODE_NORMAL,
.direction = DL_UART_DIRECTION_TX_RX,
.flowControl = DL_UART_FLOW_CONTROL_NONE,
.clockSource = DL_UART_CLOCK_BUSCLK,
.clockDivider = DL_UART_CLOCK_DIVIDE_RATIO_4,
.rxIntFifoThr = DL_UART_RX_FIFO_LEVEL_ONE_ENTRY,
.txIntFifoThr = DL_UART_TX_FIFO_LEVEL_EMPTY,
},
};
UART_Data_Object UARTObject[CONFIG_UART_COUNT] = {
{
.object =
{
.supportFxns = &UARTMSPSupportFxns,
.buffersSupported = true,
.eventsSupported = false,
.callbacksSupported = false,
.dmaSupported = false,
.noOfDMAChannels = 0,
},
.buffersObject =
{
.rxBufPtr = rxBuffer,
.txBufPtr = txBuffer,
.rxBufSize = sizeof(rxBuffer),
.txBufSize = sizeof(txBuffer),
},
},
{
.object =
{
.supportFxns = &UARTMSPSupportFxns,
.buffersSupported = true,
.eventsSupported = false,
.callbacksSupported = false,
.dmaSupported = false,
.noOfDMAChannels = 0,
},
.buffersObject =
{
.rxBufPtr = rxBuffer,
.txBufPtr = txBuffer,
.rxBufSize = sizeof(rxBuffer),
.txBufSize = sizeof(txBuffer),
},
},
};
const UART_Config UART_config[CONFIG_UART_COUNT] = {
{
&UARTObject[CONFIG_UART_0],
&UARTMSPHWAttrs[CONFIG_UART_0],
},
{
&UARTObject[CONFIG_UART_1],
&UARTMSPHWAttrs[CONFIG_UART_1],
},
};
void UART0_IRQHandler(void)
{
UARTMSP_interruptHandler((UART_Handle) &UART_config[CONFIG_UART_0]);
}
void UART1_IRQHandler(void)
{
UARTMSP_interruptHandler((UART_Handle) &UART_config[CONFIG_UART_1]);
}
void UARTMSP_eventCallback(
UART_Handle handle, uint32_t event, uint32_t data, void *userArg)
{
}