


Part Number: AM2432
Other Parts Discussed in Thread: SYSCONFIG
Hello,
I am working on CAN-FD Protocol on AM2432 Sitara Microcontroller. For simply testing the functionality of CAN Controller, I have selected the internal loopback example from AM2432 SDK (C:\ti\mcu_plus_sdk_am243x_10_01_00_32\examples\drivers\mcan\canfd_loopback_interrupt) and modified it for external read/write operation of CAN Protocol.
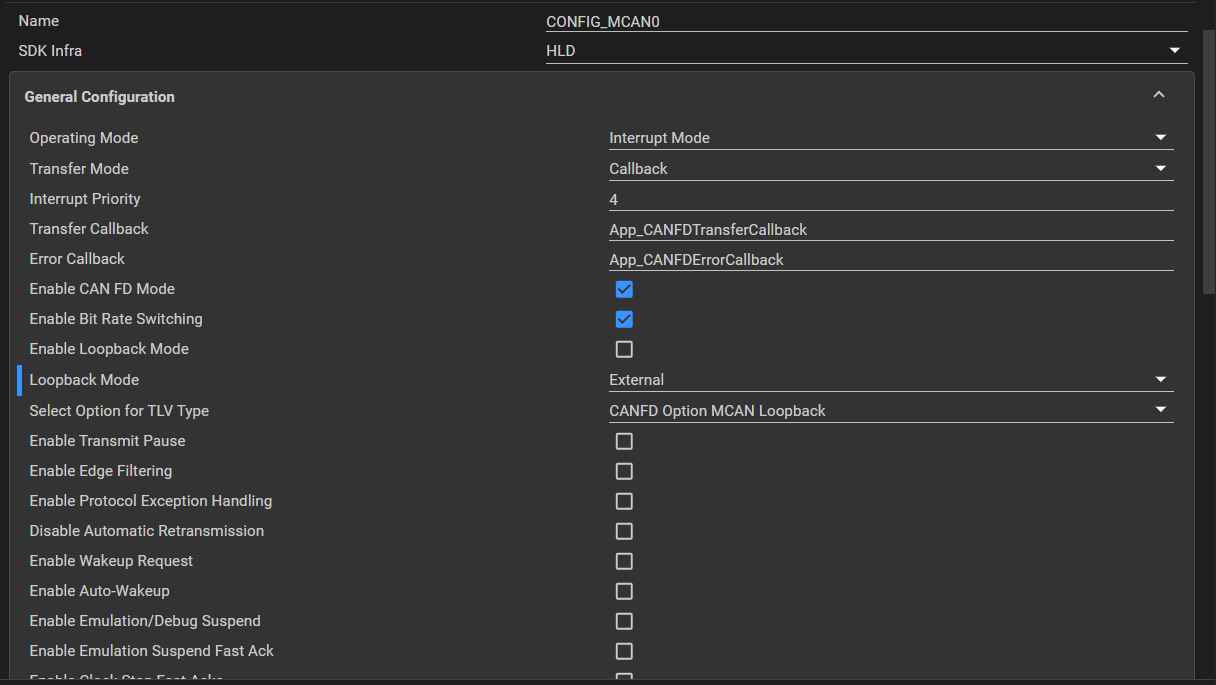
For making it as external read/write compatible, I have made the changes in sysConfig.
Disable Internal Loopback and set as external.
Moreover, I have imported canfd_external_read_write file from C:\ti\mcu_plus_sdk_am243x_10_01_00_32\examples\drivers\mcan\canfd_external_read_write for performing read/write operation.
I am monitoring CAN Messages in Logic Analyser on MCAN TX and MCAN Rx Signal. However, CAN is failing to transmit /receive data from/to the bus.
What modifications I required to do for external read/write.
Do you have any pre-built or tested example code which i can prefere for configuration of CAN Module.?
Kindly provide your feedback on the same.


