Hi,
My customer is using TM4C1290NCPDT and CAN module.
They are seeing a lot of “Bit 1 Error” during communication.
According to Data sheet, “Bit 1 Error” means data conflict on the bus.
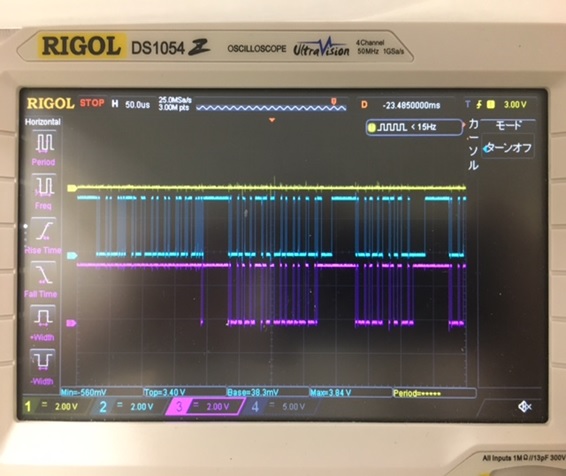
They monitor data lines and found TX and RX happen same time.
Blue: CAN RX
Purple: CAN TX
I thought CAN module handles receive/transmit based on each priority and bus usage.
(i.e. even software triggers both RX and TX, these requests will be treated exclusively.)
Is this not true ? Or customer missed some configurations ?
Thanks and regards,
KoT