Other Parts Discussed in Thread: EK-TM4C123GXL
Tool/software: Code Composer Studio
Hi,
- We are trying to communicate two Tiva controller on CAN BUS.
- Sample code used from TIVA library
- One controller loaded with sample Tx code.
- Another controller loaded with sample Rx code.
Issue :
On start of the communication, program enters into the error state.
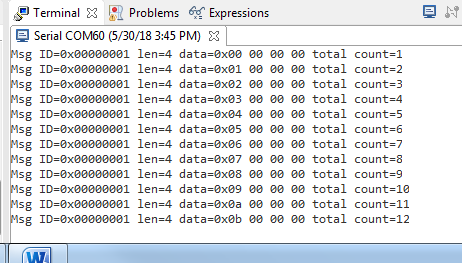
ERROR:
Error screenshots are attached for your reference.
Kindly advice to proceed further.
Thank you,
Sunil S