Part Number: TM4C129ENCPDT
Hi,
I have developed a custom board with TM4C129ENCPDT with Ethernet module enabled. I am able to talk to the controller via UDP and TCP/IP protocols using FreeRTOS-TCP and UDP stacks.
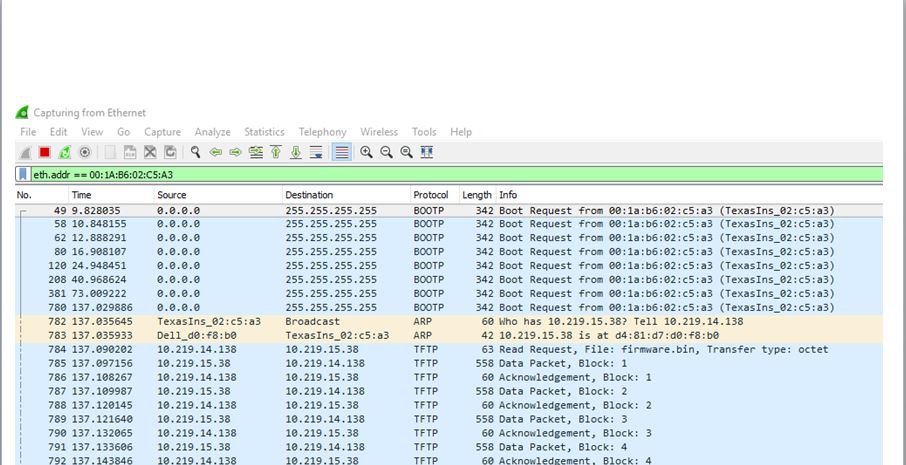
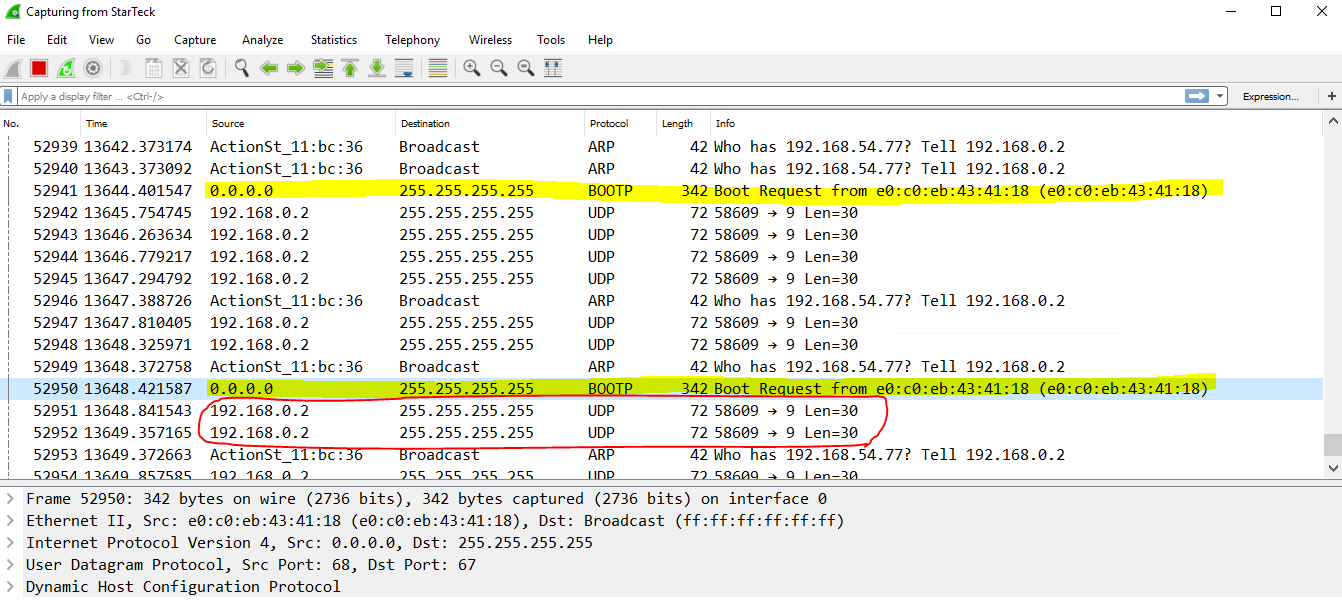
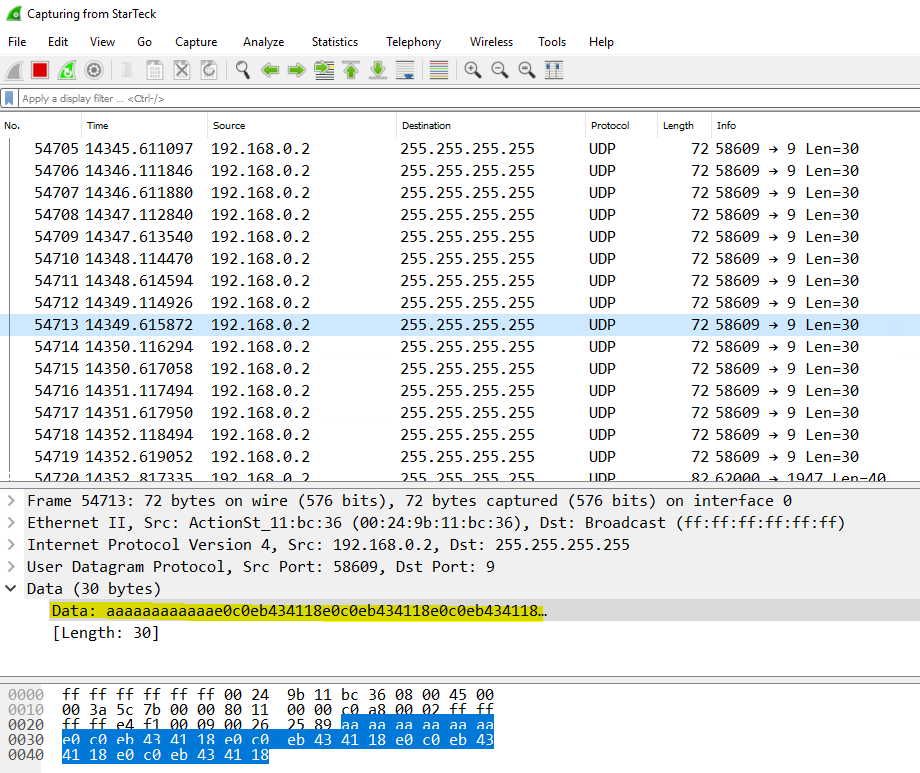
Now I want to implement a remote firmware update mechanism however I have no idea where to start. I have already read many posts on the forum regarding the same topic. I have tried connecting to the controller using LMFlash Programmer by providing the MAC address and IP address however it doesnt work and it says attempting to connect.... And it appears to stuck as it doesnt get any response from controller.
- In general can someone mention what are the steps to follow ?
Please also mention;
- How can I check if I have bootloader already in my controllers
- If not which bootloader should I use
- I am using controller internal ROM for saving few variables, may be taking 50-100 bytes of ROM space.Will it create any conflict in addresses if I use ROM based bootloader ?
- Where can I download it from
I thank you all for your time and help.
Regards,
Sahil