Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: LDC1614
Hello, I'm interfacing with LDC1614 using I2C module in Tiva C Tm4c1294NCPDT, There is something wrong I can't understand in I2C module, when I was polling in Busy bit in I2CMCS Register, the bit doesn't even changed when I was debugging, I resolved it with software delay but it's wrong I guess, I wanna use polling in the right bit in the register cause without this delay the module would be too fast that the sensor can't write or read
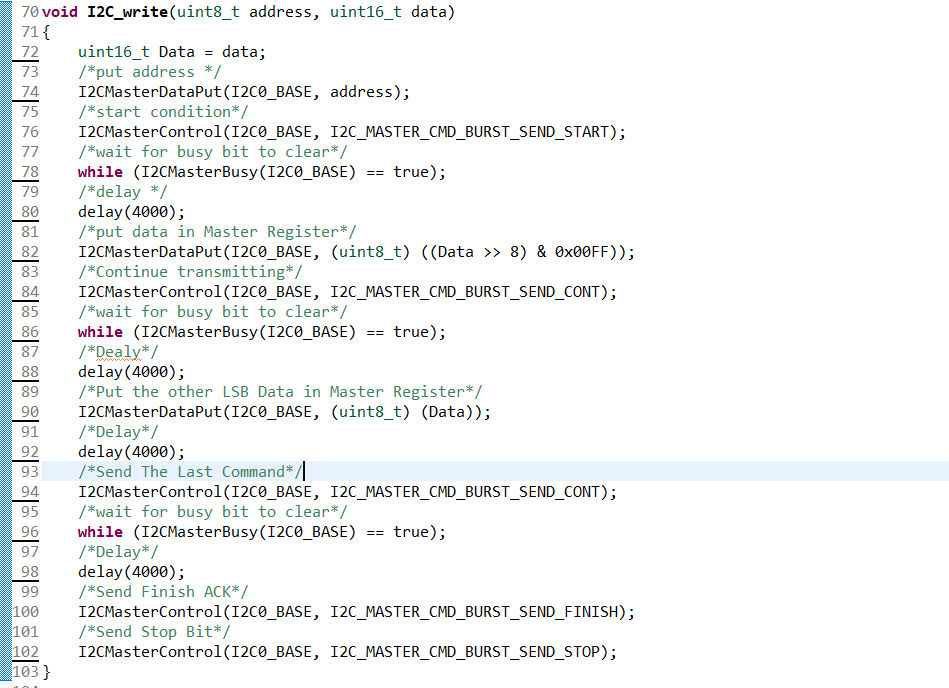
short story long: I use Burst mode command as I senf 16-bit data twice (8-bit per command), in line 78 as an example, The Busy bit in I2CMCS doesn't change so there is no polling, I followed the flowchart in the datasheet, but it didn't work
P.S: Here is a piece of code of my LDC_write Function