Other Parts Discussed in Thread: DRV8312, MOTORWARE
Hi all:
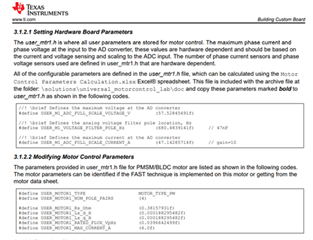
I am trying to run this lab on my DRV8312 board which is not currently supported and i am doing this by following the instructions in building custom board part of user's guide of universal motor control lab.
but I encountered some questions:
1. How should I set up all these parameters? should I just add the codes or should I copy the #if defined() form and give it a name like DRV8312? I noticed that a lot parameters are not mentioned in the guide. Is it because they are not necessary so I don't have to set them?
I wonder what is the proper way to do these settings.
2. This may be very basic but I can't find the answer. Based on question1, how should I set the build configurations->set active to make sure the lab is built according to the custom board settings.
thanks a lot