Part Number: TMDSHVMTRPFCKIT
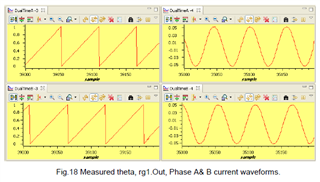
I have designed my own PCB similar to the TMDSHVMTRPFCKIT using the F28035 microcontroller. I'm working through the levels in HVACI_Sensored but I'm stuck with an issue that I can't resolve on Level3b. The "Sensored Field Oriented Control of 3-Phase Induction Motors" manual mentions that "ElecTheta and Out are of a Saw-Tooth wave shape and have the same period" as shown in the figure below.
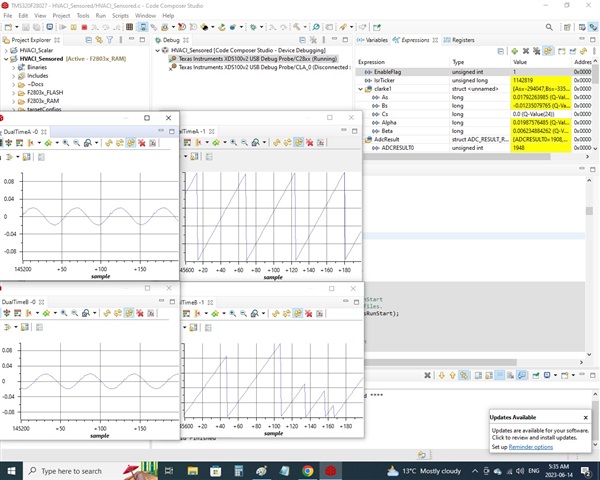
My "rg1.Out and speed1.ElecTheta curves look like the following:
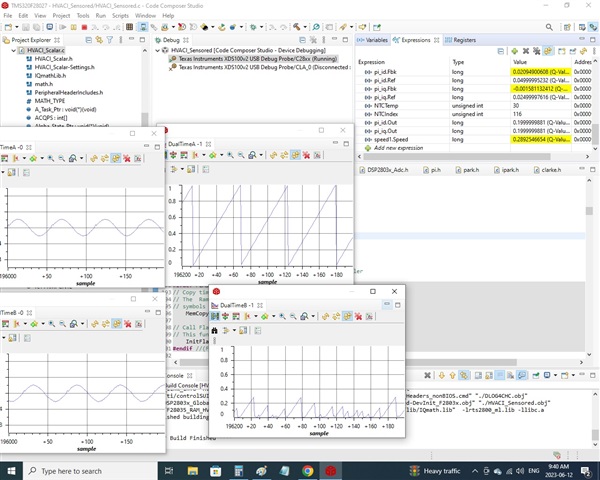
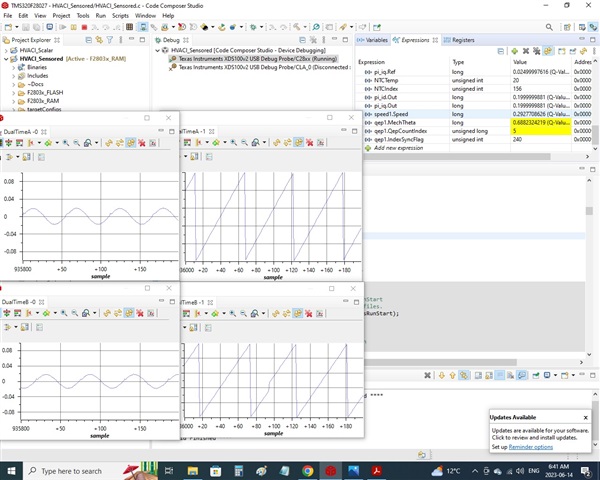
There is some issue with the speed1.ElecTheta curve. The speed1.Speed signal seems to be working correctly in the watch window.
I think the issue has something to do with the QEP index signal. When I spin the motor by hand, the qep1.QebCountIndex will increment from 4093, 4094, 0, 1, 2 and not increment any further.
Does anybody have any insight into what may be causing the discrepancy?