Part Number: TMS320F28335
Dear TI members,
I am attaching a code of my simulation for PID. I need your help to just explain parts of the code:
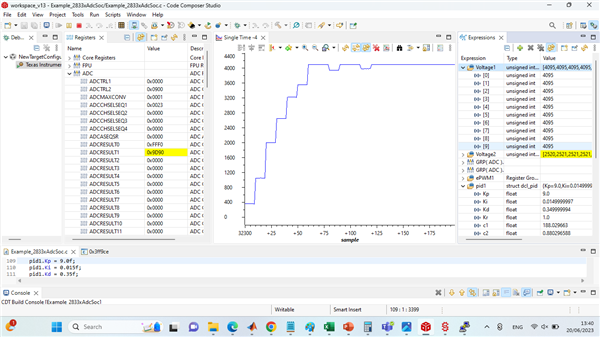
Firstly: If rk =0.25 is set, then yk was achieved with the help of 12 bit ADC values (0-4095) and from the code line 342:
yk = ((float) AdcRegs.ADCRESULT0 - 2048.0f) / 2047.0f;
yk could be between 1 and -1 .........if (float) AdcRegs.ADCRESULT0 between (4095 and 0).
Now, next line 345 : uk = DCL_runPID_C4(&pid1, rk, yk, lk);......for running the PID function. which gives Control effort value u(k).
Question1 : Question is what could be the u(k) value range in numbers??? Please explain this line 345.
Line 348: clampactive = DCL_runClamp_C1(&uk, upperlim, lowerlim); defining the upper and lower limit saturation.
Question 2: Line 350: lk = (clampactive == 0U) ? 1.0f : 0.0f;.... There is no compulsion for choosing either 1 or 0 for clampactive. and can we choose any of them????
For line 353-354:
Duty = (uk / 2.0f + 0.5f) * (float) EPwm1Regs.TBPRD;
EPwm1Regs.CMPA.half.CMPA = (Uint16) Duty;
Question3:
From above line, if u(k) is known from Question 1, then why are we dividing by 2.5 (2.0f+0.5f) and then it multiply with EPwm1Regs.TBPRD ? This Epwm is the one at which we are sampling the ADC at line 286 (EPwm1Regs.TBPRD = 0xFFFF)??? If yes then how this above duty cycle changes if suppose your y(k) changes dues to ADC values? I think I should remove line 309 and then check GPIO0 or GPIO1 to see the change of duty cycle if y(k) changes.
//###########################################################################
//
// FILE: Example_2833xAdcSoc.c
//
// TITLE: ADC Start of Conversion Example
//
//! \addtogroup f2833x_example_list
//! <h1> ADC Start of Conversion (adc_soc)</h1>
//!
//! This ADC example uses ePWM1 to generate a periodic ADC SOC on SEQ1.
//! Two channels are converted, ADCINA3 and ADCINA2.
//!
//! \b Watch \b Variables \n
//! - Voltage1[10] - Last 10 ADCRESULT0 values
//! - Voltage2[10] - Last 10 ADCRESULT1 values
//! - ConversionCount - Current result number 0-9
//! - LoopCount - Idle loop counter
//
//###########################################################################
// $TI Release: $
// $Release Date: $
// $Copyright:
// Copyright (C) 2009-2023 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//###########################################################################
//
// Included Files
//
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
#include "DSP2833x_Device.h"
#include "DSP2833x_Examples.h"
#include "DSP2833x_GlobalPrototypes.h"
#include "DCLF32.h"
//
// Function Prototypes
//
void gpio_select(void);
void Setup_ePWM1(void);
__interrupt void adc_isr(void);
//
// Globals
//
Uint16 LoopCount;
Uint16 ConversionCount;
Uint16 Voltage1[10];
Uint16 Voltage2[10];
//DCL_PID pid1 = PID_DEFAULTS;
//typedef struct dcl_pid pid1;
struct dcl_pid pid1;
//float pid1;
DCL_PID pid1 = PID_DEFAULTS;
float32_t yk;
float32_t lk;
float32_t uk;
//float32_t rk = 0.25; // initial value for control reference
//float32_t lk = 1.0; // control loop not saturated
float32_t rk; // initial value for control reference
float32_t lk; // control loop not saturated
float Duty;
float upperlim = 0.95;
float lowerlim = 0.05;
unsigned int clampactive;
//
// Main
//
void main(void)
{
//DCL_PID pid1 = PID_DEFAULTS;
pid1.Kp = 9.0f;
pid1.Ki = 0.015f;
pid1.Kd = 0.35f;
pid1.Kr = 1.0f;
pid1.c1 = 188.0296600613396f;
pid1.c2 = 0.880296600613396f;
pid1.d2 = 0.0f;
pid1.d3 = 0.0f;
pid1.i10 = 0.0f;
pid1.i14 = 1.0f;
pid1.Umax = 1.0f;
pid1.Umin = -1.0f;
rk = 0.25; // initial value for control reference
lk = 1.0;
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
//
InitSysCtrl();
EALLOW;
#if (CPU_FRQ_150MHZ) // Default - 150 MHz SYSCLKOUT
//
// HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 150/(2*3) = 25.0 MHz
//
#define ADC_MODCLK 0x3
#endif
#if (CPU_FRQ_100MHZ)
//
// HSPCLK = SYSCLKOUT/2*ADC_MODCLK2 = 100/(2*2) = 25.0 MHz
//
#define ADC_MODCLK 0x2
#endif
EDIS;
//
// Define ADCCLK clock frequency ( less than or equal to 25 MHz )
// Assuming InitSysCtrl() has set SYSCLKOUT to 150 MHz
//
EALLOW;
SysCtrlRegs.HISPCP.all = ADC_MODCLK;
EDIS;
//
// Step 2. Initialize GPIO:
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
// InitGpio(); // Skipped for this example
//
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
//
DINT;
//
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU interrupts and clear all CPU interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.
//
InitPieVectTable();
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
//
EALLOW; // This is needed to write to EALLOW protected register
PieVectTable.ADCINT = &adc_isr;
EDIS; // This is needed to disable write to EALLOW protected registers
//* configure ePWM1 */
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
//InitEPwm1Gpio(); // [F2806x_EPwm.c]
gpio_select();
Setup_ePWM1(); // init ePWM1A
//void Setup_ePWM1(void)
//{
//EPwm1Regs.TBCTL.bit.CTRMODE = 3; // freeze TB counter
//EPwm1Regs.TBCTL.bit.PRDLD = 1; // immediate load
//EPwm1Regs.TBCTL.bit.PHSEN = 0; // disable phase loading
//EPwm1Regs.TBCTL.bit.SYNCOSEL = 3; // disable SYNCOUT signal
//EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0; // TBCLK = SYSCLKOUT
//EPwm1Regs.TBCTL.bit.CLKDIV = 0; // clock divider = /1
//EPwm1Regs.TBCTL.bit.FREE_SOFT = 2; // free run on emulation suspend
//EPwm1Regs.TBPRD = 0x2328; // set period for ePWM1 (0x2328 = 10kHz)
//EPwm1Regs.TBPHS.all = 0; // time-base Phase Register
//EPwm1Regs.TBCTR = 0; // time-base Counter Register
//EPwm1Regs.ETSEL.bit.SOCAEN = 1; // enable SOC on A group
//EPwm1Regs.ETSEL.bit.SOCASEL = 1; // select SOC from zero match
//EPwm1Regs.ETPS.bit.SOCAPRD = 1; // generate pulse on 1st event
//EPwm1Regs.CMPCTL.bit.SHDWAMODE = 0; // enable shadow mode
//EPwm1Regs.CMPCTL.bit.LOADAMODE = 2; // reload on CTR=zero
//EPwm1Regs.CMPA.half.CMPA = 0x0080; // set compare A value
//EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // HIGH on CMPA up match
//EPwm1Regs.AQCTLA.bit.ZRO = AQ_CLEAR; // LOW on zero match
//}
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
//
// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2833x_InitPeripherals.c
//
// InitPeripherals(); // Not required for this example
InitAdc(); // For this example, init the ADC
//
// Step 5. User specific code, enable interrupts:
//
//gpio_select();
//Setup_ePWM1(); // init ePWM1A,ePWM1B
//
// Enable ADCINT in PIE
//
PieCtrlRegs.PIEIER1.bit.INTx6 = 1;
IER |= M_INT1; // Enable CPU Interrupt 1
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
LoopCount = 0;
ConversionCount = 0;
//
// Configure ADC
//
AdcRegs.ADCMAXCONV.all = 0x0001; // Setup 2 conv's on SEQ1
AdcRegs.ADCCHSELSEQ1.bit.CONV00 = 0x3; // Setup ADCINA3 as 1st SEQ1 conv.
AdcRegs.ADCCHSELSEQ1.bit.CONV01 = 0x2; // Setup ADCINA2 as 2nd SEQ1 conv.
//
// Enable SOCA from ePWM to start SEQ1
//
AdcRegs.ADCTRL2.bit.EPWM_SOCA_SEQ1 = 1;
AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1 = 1; // Enable SEQ1 interrupt (every EOS)
//
// Assumes ePWM1 clock is already enabled in InitSysCtrl();
//
EPwm1Regs.ETSEL.bit.SOCAEN = 1; // Enable SOC on A group
EPwm1Regs.ETSEL.bit.SOCASEL = 4; // Select SOC from from CPMA on upcount
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
EPwm1Regs.CMPA.half.CMPA = 0x0080; // Set compare A value
EPwm1Regs.TBPRD = 0xFFFF; // Set period for ePWM1
EPwm1Regs.TBCTL.bit.CTRMODE = 0; // count up and start
//
// Wait for ADC interrupt
//
for(;;)
{
LoopCount++;
}
}
//
void Setup_ePWM1(void)
{
EPwm1Regs.TBCTL.bit.CTRMODE = 3; // freeze TB counter
EPwm1Regs.TBCTL.bit.PRDLD = 1; // immediate load
EPwm1Regs.TBCTL.bit.PHSEN = 0; // disable phase loading
EPwm1Regs.TBCTL.bit.SYNCOSEL = 3; // disable SYNCOUT signal
EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0; // TBCLK = SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = 0; // clock divider = /1
EPwm1Regs.TBCTL.bit.FREE_SOFT = 2; // free run on emulation suspend
EPwm1Regs.TBPRD = 0x2328; // set period for ePWM1 (0x2328 = 10kHz)
EPwm1Regs.TBPHS.all = 0; // time-base Phase Register
EPwm1Regs.TBCTR = 0; // time-base Counter Register
EPwm1Regs.ETSEL.bit.SOCAEN = 1; // enable SOC on A group
EPwm1Regs.ETSEL.bit.SOCASEL = 1; // select SOC from zero match
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // generate pulse on 1st event
EPwm1Regs.CMPCTL.bit.SHDWAMODE = 0; // enable shadow mode
EPwm1Regs.CMPCTL.bit.LOADAMODE = 2; // reload on CTR=zero
EPwm1Regs.CMPA.half.CMPA = 0x0080; // set compare A value
EPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // HIGH on CMPA up match
EPwm1Regs.AQCTLA.bit.ZRO = AQ_CLEAR; // LOW on zero match
}
void gpio_select(void)
{
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO0 = 0; // Enable pullup on GPIO0
GpioCtrlRegs.GPAPUD.bit.GPIO1 = 0; // Enable pullup on GPIO1
GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 1; // GPIO0 = PWM1A
GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 1; // GPIO0 = PWM1B
EDIS;
}
// adc_isr -
//
__interrupt void
adc_isr(void)
{
Voltage1[ConversionCount] = AdcRegs.ADCRESULT0 >>4;
Voltage2[ConversionCount] = AdcRegs.ADCRESULT1 >>4;
// read ADC channel
yk = ((float) AdcRegs.ADCRESULT0 - 2048.0f) / 2047.0f;
// run PID controller
uk = DCL_runPID_C4(&pid1, rk, yk, lk);
// external clamp for anti-windup reset
clampactive = DCL_runClamp_C1(&uk, upperlim, lowerlim);
//clampactive = DCL_runClamp_C1(&uk, Umax, Umin);
lk = (clampactive == 0U) ? 1.0f : 0.0f;
// write u(k) to PWM
Duty = (uk / 2.0f + 0.5f) * (float) EPwm1Regs.TBPRD;
EPwm1Regs.CMPA.half.CMPA = (Uint16) Duty;
//
// If 40 conversions have been logged, start over
//
if(ConversionCount == 9)
{
ConversionCount = 0;
}
else
{
ConversionCount++;
}
//
// Reinitialize for next ADC sequence
//
AdcRegs.ADCTRL2.bit.RST_SEQ1 = 1; // Reset SEQ1
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1; // Clear INT SEQ1 bit
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
return;
}
//
// End of File
//
Please explain all the questions step by step. Sorry I am new to using DCL PID simulation.
Thanks
Regards
Arsalan