Part Number: TMS320F28379D
Hi,.
I'm using F28379D controller for my application of controlling two full bridge converter. In this, I am using 4-EPWMs. Im keeping EPWM1 as master and which will generate syncout event when EPWM_SYNC_OUT_PULSE_ON_COUNTER_ZERO. The problem I'm facing was (focusing only on EPWM3), when I'm changing the phase shift value from 0 to 1 in TBPHS of EPWM3, it's missing one entire cycle of pulse. I have tried with many variety of values and found that it happens only when I shift from 0 to other values. I have read some E2E forums and TRM, but didn't getting proper solution for this. The configuration which I've used in EPWM3 was given below, have a look at it. Kindly provide me the solution, why it's happening and how to resolve this. Thanks
EPWM3:
//
// Set-up TBCLK
//
EPWM_setTimeEPWM3_BASEPeriod(EPWM3_BASE, EPWM_TIMER_TBPRD-1);
EPWM_setPhaseShift(EPWM3_BASE, 0U);
EPWM_setTimeEPWM3_BASECounter(EPWM3_BASE, 0U);
//
// Set Compare values
//
EPWM_setCounterCompareValue(EPWM3_BASE,
EPWM_COUNTER_COMPARE_A,
(EPWM_TIMER_TBPRD/2)-1);
EPWM_setCounterCompareValue(EPWM3_BASE,
EPWM_COUNTER_COMPARE_B,
(EPWM_TIMER_TBPRD/2)-1);
//
// Set up counter mode
//
EPWM_setTimeEPWM3_BASECounterMode(EPWM3_BASE, EPWM_COUNTER_MODE_UP);
EPWM_disablePhaseShiftLoad(EPWM3_BASE);
EPWM_setClockPrescaler(EPWM3_BASE,
EPWM_CLOCK_DIVIDER_1,
EPWM_HSCLOCK_DIVIDER_1);
//
// Set up shadowing
//
EPWM_setCounterCompareShadowLoadMode(EPWM3_BASE,
EPWM_COUNTER_COMPARE_A,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(EPWM3_BASE,
EPWM_COUNTER_COMPARE_B,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setDeadBandControlShadowLoadMode(EPWM3_BASE, EPWM_DB_LOAD_ON_CNTR_ZERO);
//
// Set actions
//
EPWM_setActionQualifierAction(EPWM3_BASE,
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEEPWM3_BASE_ZERO);
EPWM_setActionQualifierAction(EPWM3_BASE,
EPWM_AQ_OUTPUT_B,
EPWM_AQ_OUTPUT_HIGH,
EPWM_AQ_OUTPUT_ON_TIMEEPWM3_BASE_ZERO);
EPWM_setActionQualifierAction(EPWM3_BASE,
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEEPWM3_BASE_UP_CMPA);
EPWM_setActionQualifierAction(EPWM3_BASE,
EPWM_AQ_OUTPUT_B,
EPWM_AQ_OUTPUT_LOW,
EPWM_AQ_OUTPUT_ON_TIMEEPWM3_BASE_UP_CMPB);
//
// ePWM1 SYNCO is generated on CTR=0
//
EPWM_setSyncOutPulseMode(EPWM1_BASE, EPWM_SYNC_OUT_PULSE_ON_COUNTER_ZERO);
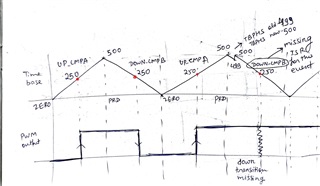
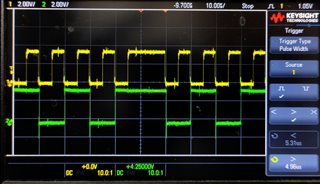
Here i've attached the missing pulse event. Yellow - EPWM3A, Green - EPWM3B both are complementry signals.
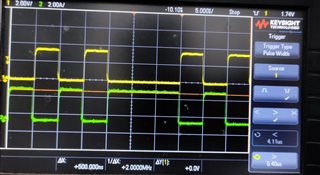


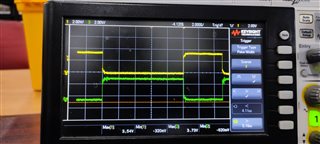
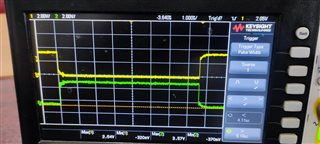
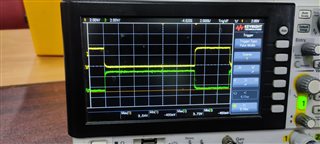
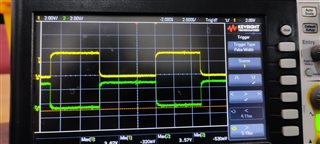
 Image showing PWM4A during phase transition from499 to 500.
Image showing PWM4A during phase transition from499 to 500.