- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
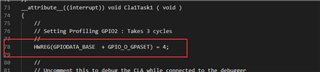
We are using the CLA to speed up control law execution with our power electronic system and toggling a GPIO to allow us to profile the execution times on the CLA. We have a system which uses the EPWM1 to trigger an ADC measurement and the EOC for the ADC measurement then triggers the CLA task 1. This all works as expected. Initially I have just toggled an LED in the CLA task in order to check how long things take, here is the CLA task code:-
The task is triggered every 20us as expected but the toggling of the LED on and off takes ~2us. This seems like a long time, especially for the CLA which should be a very fast peripheral. THE CLA is in direct control of hte GPIO and this is what we get:-
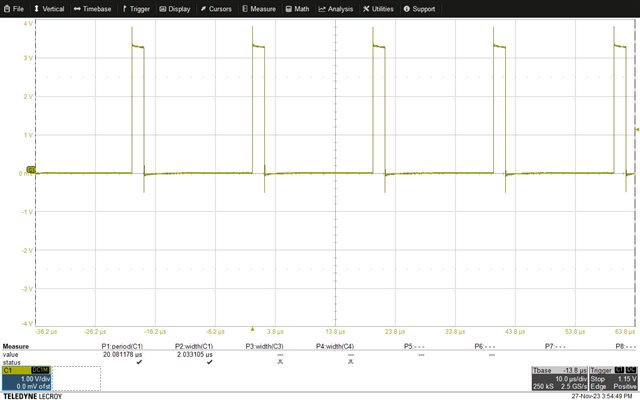
Any idea why turning an LED on and off like this in a CLA task would take so long to execute?