


Other Parts Discussed in Thread: DRV8305
Hi Team,
Here's an issue from the customer may need your help:
Hardware: TMS320F28069M + DRV8305 kit
software: Instaspin-FOC lab 11a
The motor operates normally. I want to modify the code. Use the angle of encoder feedback to replace the senseless. I added the Enc.c and QEP.c files under the original project, added the QEP predefinition, added the enc object and handle, and initialized:


Then in the angle and speed feedback part, changes were made in the blue part of the picture below:
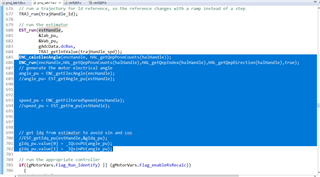
The code compiles without problems. But when it is enabled (gMotorVars.Flag_enableSys = 1) and gMotorVars.Flag_Run_Identify = 0 during operation, the motor starts to rotate rapidly and is uncontrollable. What could possibly be causing this?
--
Thanks & Regards
