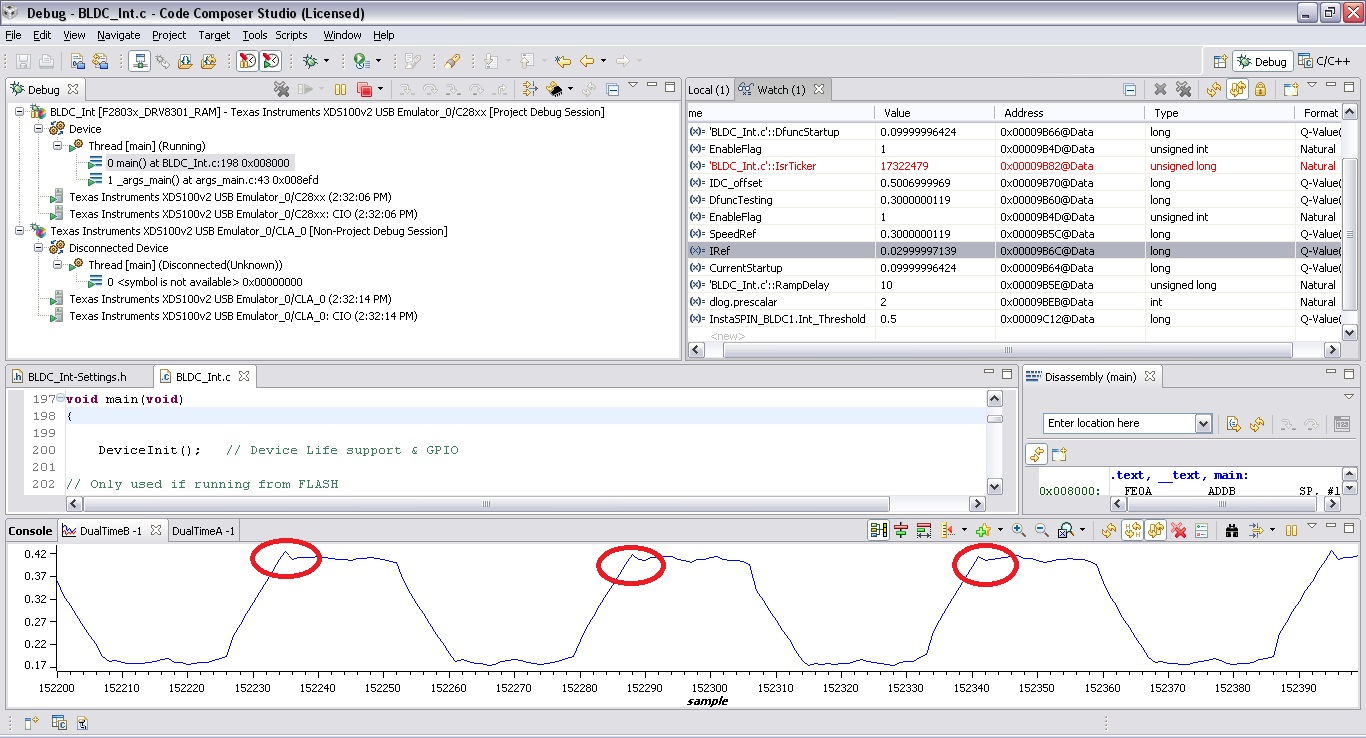
Refer to InstaSPIN_2D00_BLDC-Sensorless-Control.pdf in C:\TI\controlSUITE\development_kits\DRV830x-HC-C2-KIT_v100\BLDC_Int\~Doc , it's talking about config,set up and testing of BLDC_Int only. There is no details of InstaSPIN-BLDC module.
So, How to get source code or document explain of "InstaSPIN-BLDC" module ? Thank you.