- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software:
Dear TI Support Team,
I am currently working with the LAUNCHXL-F280039C paired with the BOOSTXL-3PhGanInv module to control a motor using the Universal Motor Control Labs firmware at LEVEL 4.
After successfully completing all the previous levels, I encountered some strange behavior when running the motor at LEVEL 4.
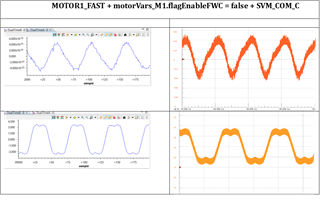
I’ve attached a figure with graphs from both DATALOG and oscilloscope waveforms for better visualization. These graphs were generated using motor_datalog_fp2.graphProp from <install_location>\solutions\universal_motorcontrol_lab\common\debug.
user_mtr1.h file for completeness.
Non-Sinusoidal Currents in Level 4:
In LEVEL 3 (open-loop), the current waveforms are perfectly sinusoidal, as shown in Figures 1 and 2. However, at LEVEL 4, during motor startup, the current waveform is sinusoidal but becomes distorted when the motor reaches the set speed (Figures 3–6).
Why do the current waveforms lose their sinusoidal shape in LEVEL 4?
FAST vs. Encoder Differences:
Figures 3, 4, 5, and 6 clearly show differences in the current waveforms between FAST and Encoder. For example, the distortion visible in Figure 4 (FAST) is different from Figure 6 (Encoder).
What could be causing this difference between FAST and Encoder?
Phase Voltage Offset:
Comparing the phase voltage measurements (VA) in Figures 7, 8:
I would greatly appreciate your insights on these issues to help me resolve the distortion in the current waveforms. Please let me know if further information is required.
Thank you for your support!
Marco Lasagni