
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
My Code:
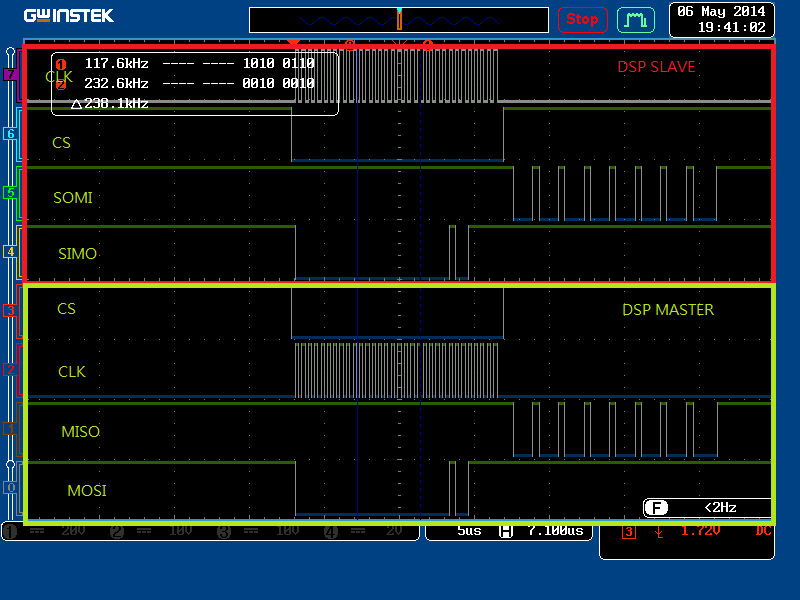
I tried to use McBsp's interrupt in SPI Mode, then communicate between both.
But I can send a 32bits data out from Master, but I can not receive any data from Slave.
Who can help me to solve it?
Thank you first.




