


Hello!
I'm trying to make a code for my JY-MCU bluetooth to work with my PICCOLO controlstick F28069.
I used an external supply to deliver 5V to the bluetooth module. Since it was already configured, I can pair and connect to it successfully using my computer or Android.
To test the SCI, I opened the example: Example_2802xSci_Echoback.
It works just fine, I can see whatever it transmits and receives Using a terminal.
Then, I modified this code so I could actually use a GPIO that I could connect my bluetooth module. That's what I did:
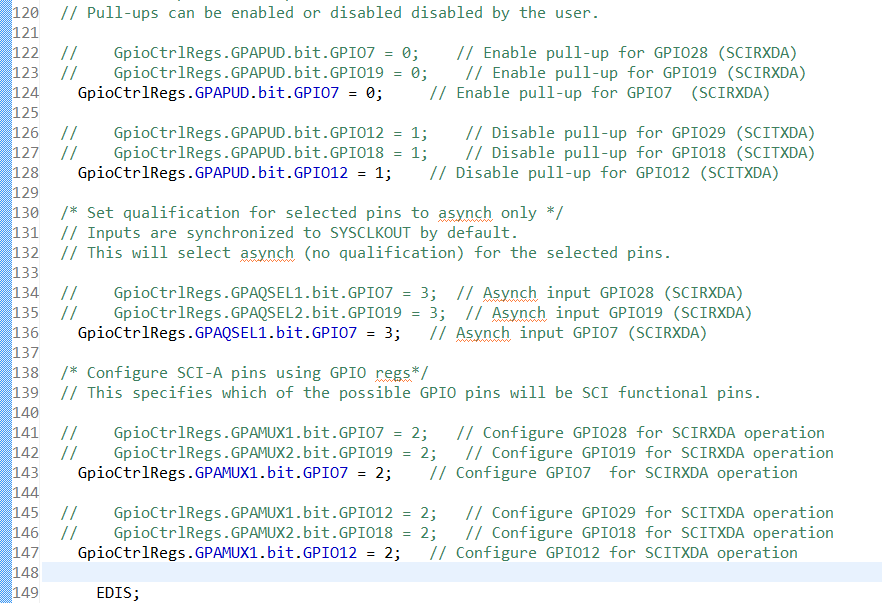
So I connected RX of my module to GPIO12 and TX to GPIO7. In this module, when I send the command "AT" it should return the module name or version. But it doesn't return anything.

It gets stuck in the while loop.
Also I was thinking about the RX/TX level. The module requires a 3.3V logic level and I couldn't find in c2000 datasheet what is the voltage for a HIGH level. So I assume it is 3.3V as well.
Also, I'd like to know how can I write something to the terminal using those ports GPIO7 and 12?? In the echoback example, I noticed that if you transmit something ( scia_msg() ), it will appear in the terminal (just like a printf). Although, if I just change the ports to GPIO7 and 12 (since I will be using those), it won't display anything in the terminal when I transmit something.
ps: I have a code for arduino where I can configure it, and it works just fine.
Any ideas?
Thanks


