- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Part Number: DRV8301-HC-C2-KIT
Hi, engineers
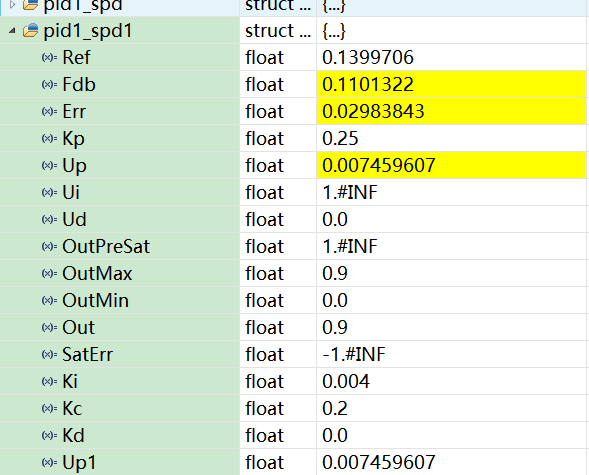
I have trouble in running the BLDC motor with BLDC_sensorless code in DRV830x-HC-C2-KIT, BLDC_sensorless Project works well when I use hall sensor in speed closed mode and speed feedback can also achieve reference speed with speed PI controller, besides, the motor spin as well when just using CMTN_TRIG_MACRO(cmtn1) to commutation. But problems are coming when using CMTN_TRIG_MACRO(cmtn1) to commutation and closed speed mode ,the feedback speed can’t achieve command speed,speed PI controller just like didn't work and output of integrating was almost zero, I've attached the picture of PI output in detail below.
I would like to express my great appreciation to you in first.