
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hi,
I have a problem with my EPwm signal, or maybe it is the problem with my ADC? I am new in this stuff and it is hard to tell for me what I am doing wrong. First I just wanted to start EPwm in any configuration and it looked like it worked, I used it to control brightness of a diode. But then I wanted to check how it actually looks so I connected it with a wire with Adc to see its trajectory in CCS Debug mode. This is what i got:
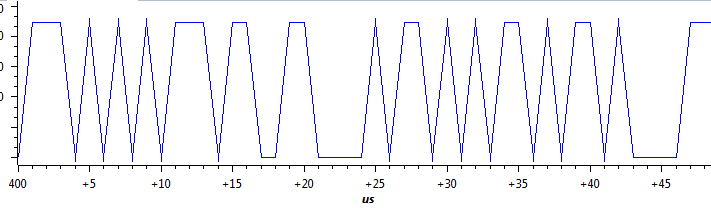
I dont think this is a good result, I belive it should be perfectly steady, meanwhile what i got looks like a total chaos, when i refresh the results it sometimes gets even wierder,
Here are the properties of the graph in CCS:

And here is my code:
#include "F28x_Project.h"
void Init_EPwm2Gpio(void);
void Init_Clocks(void);
void Configure_EPwm2Regs(void);
void Configure_ADC(void);
void Configure_EPWM_trig_ADC(void);
void SetupADCEpwm(Uint16 channel);
#define RESULTS_BUFFER_SIZE 256
Uint16 AdcaResults[RESULTS_BUFFER_SIZE];
Uint16 resultsIndex;
volatile Uint16 bufferFull;
int main(void)
{
InitSysCtrl(); //inicjalizacja zegarow, watchdoga, pll itp. // Nie wnikałem za bardzo
Init_EPwm2Gpio(); // konfiguracja gpio do epwm2
Init_Clocks();
Configure_EPwm2Regs(); // Konfiguracja epwm2
////////////////////////////////////////////////////////////////////////////// Here's the part I don't really understand but I belive this is not a case here ////////////////
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Configure_ADC();
Configure_EPWM_trig_ADC();
SetupADCEpwm(2);
for(;;)
{
AdcaResults[resultsIndex++] = AdcaResultRegs.ADCRESULT1;
if(RESULTS_BUFFER_SIZE <= resultsIndex)
{
resultsIndex = 0;
bufferFull = 1;
}
}
}
void Init_EPwm2Gpio()
{
EALLOW;
GpioCtrlRegs.GPAPUD.bit.GPIO2 = 1; // Disable pull-up on GPIO2 (EPWM2A)
GpioCtrlRegs.GPAPUD.bit.GPIO3 = 1; // Disable pull-up on GPIO3 (EPWM2B)
// Configure EPwm-2 pins using GPIO regs
// This specifies which of the possible GPIO pins will be EPWM2 functional pins.
GpioCtrlRegs.GPAMUX1.bit.GPIO2 = 1; // Configure GPIO2 as EPWM2A
GpioCtrlRegs.GPAMUX1.bit.GPIO3 = 1; // Configure GPIO3 as EPWM2B
EDIS;
}
void Init_Clocks()
{
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1; //When set PWM time bases of all the PWM modules start counting.
CpuSysRegs.PCLKCR2.bit.EPWM2=1; // epwm clock enable
CpuSysRegs.PCLKCR2.bit.EPWM1=1; // epwm1 wyzwala adc, epwm2 do diody
CpuSysRegs.PCLKCR13.bit.ADC_A = 1;
EDIS;
}
void Configure_EPwm2Regs()
{
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // liczenie w gore
EPwm2Regs.TBPRD = 5000; // Przy 200MHz taktowania plytki, podzieleniu przez cztery (2*2), okres 5000 powinien dac 100us podstawy
EPwm2Regs.TBPHS.bit.TBPHS = 0; // faza rowna 0
EPwm2Regs.TBCTR = 0; // resetowanie licznika
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2;
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV2; // oba dziela przez dwa, lacznie przez cztery
EPwm2Regs.CMPCTL.bit.SHDWAMODE = 0x0;//CC_IMMEDIATE;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = 0x0;//CC_IMMEDIATE;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm2Regs.CMPA.bit.CMPA = 2500; // counter compare
EPwm2Regs.AQCTLA.bit.PRD = AQ_CLEAR; // zeruj pwma na poczatku okresu
EPwm2Regs.AQCTLA.bit.CAU = AQ_SET; // jak CC jest rowny lincznikowi PWM to ustalam akcje, w tym przypadku stan wysoki
}
void Configure_ADC(void)
{
EALLOW;
//write configurations
AdcaRegs.ADCCTL2.bit.PRESCALE = 6; //set ADCCLK divider to /4
AdcSetMode(ADC_ADCA, ADC_RESOLUTION_12BIT, ADC_SIGNALMODE_SINGLE);
//Set pulse positions to late
AdcaRegs.ADCCTL1.bit.INTPULSEPOS = 1;
//power up the ADC
AdcaRegs.ADCCTL1.bit.ADCPWDNZ = 1;
//delay for 1ms to allow ADC time to power up
DELAY_US(1000);
EDIS;
}
void Configure_EPWM_trig_ADC(void)
{
EALLOW;
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;
EPwm1Regs.TBPRD = 0x1000;// Set period to 4096 counts
EPwm1Regs.CMPA.bit.CMPA = 0x0800; // Set compare A value to 2048 counts
EPwm1Regs.ETSEL.bit.SOCAEN = 1; // Enable SOC on A group
EPwm1Regs.ETSEL.bit.SOCASEL = 4; // 100: Enable event time-base counter equal to CMPA when the timer is incrementing or CMPC when the timer is incrementing
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event
EDIS;
}
void SetupADCEpwm(Uint16 channel)
{
Uint16 acqps;
//
//determine minimum acquisition window (in SYSCLKS) based on resolution
//
if(ADC_RESOLUTION_12BIT == AdcaRegs.ADCCTL2.bit.RESOLUTION)
{
acqps = 14; //75ns
}
else //resolution is 16-bit
{
acqps = 63; //320ns
}
EALLOW;
AdcaRegs.ADCSOC1CTL.bit.CHSEL = channel; //wybierajac channel=2, SOC1 bedzie pobierac wartosc z adcina2 i zapisywac je w adcresult1
AdcaRegs.ADCSOC1CTL.bit.ACQPS = acqps; //sample window is 100 SYSCLK cycles
AdcaRegs.ADCSOC1CTL.bit.TRIGSEL = 5; //trigger on ePWM1 SOCA/C
EDIS;
}




