
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi,
I am trying to perform SPI communication between F28379D launchpad (Master) and F28379D ControlCard (Slave). I have written the code following the SPI loopback example shipped in ControlSuite. I configure the master to send a counter data continuously over SPI and slave is configured to read the received data continuously. During transmit I ensure TXFFST is empty before placing the new data on SPITXBUF and while receiving I will check RXFFST if new data is available before reading the data from SPIRXBUF.
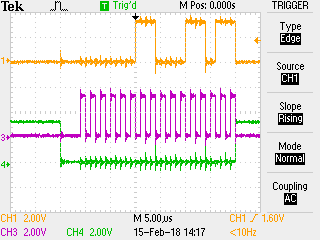
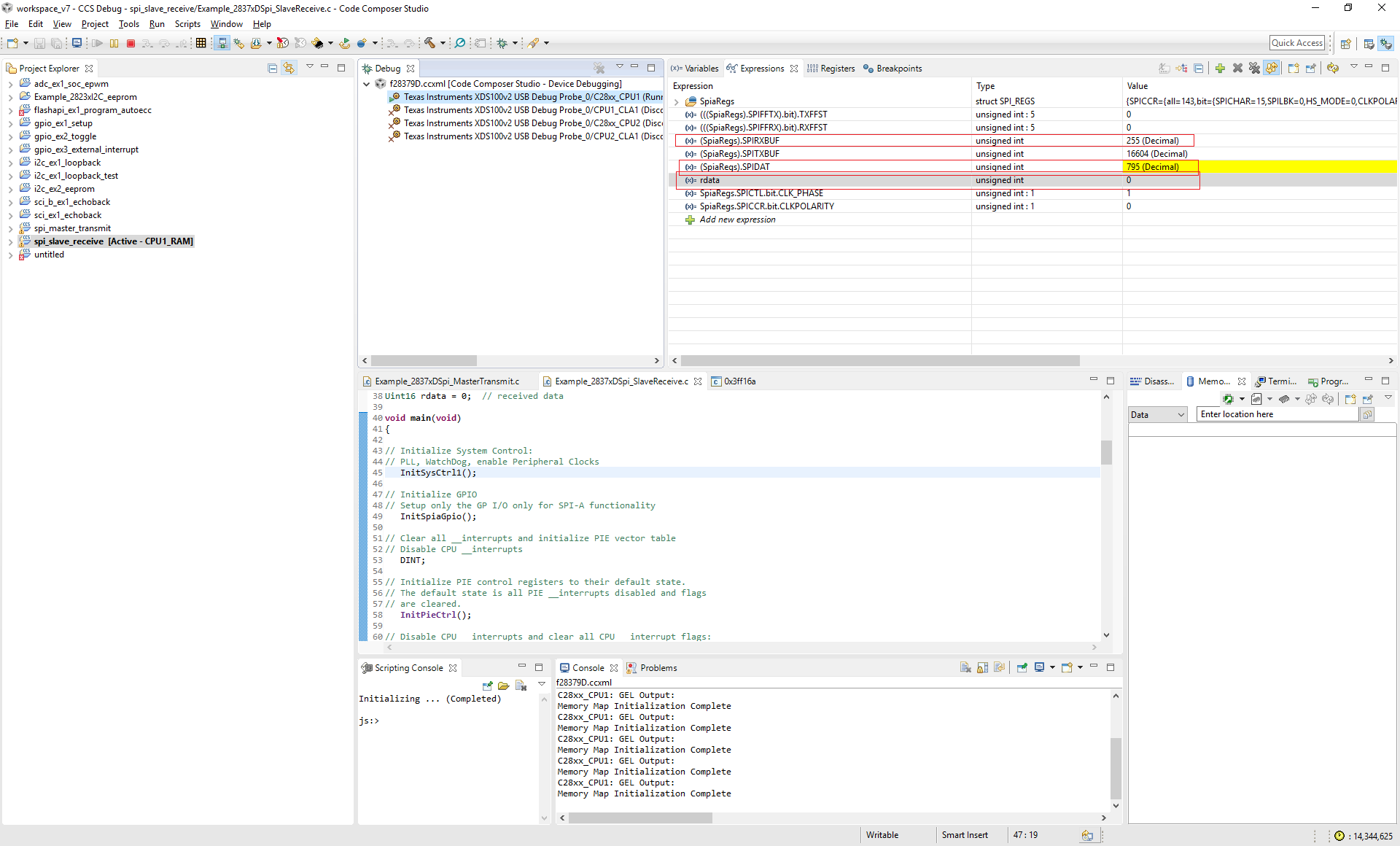
When I configure both master and slave either as rising edge-no delay or as falling edge-delay half cycle clock modes, I can see the data is received properly in slave. But if I configure both master and slave either as rising edge-half cycle delay or as falling edge-no delay, I am not able to read properly from SPIRXBUF. In these cases, SPIDAT is updated by the received data regularly but the data from SPIDAT is not loaded properly into SPIRXBUF and RXFFST is zero (attached snapshot). Also the SIMO data along with clock and CS is present and can be confirmed using CRO (attached screenshot) and the SIMO data observed in CRO matches with the data observed in SPIDAT.
If I replace the slave with other board like F28075 i can see the data being received properly in SPIRXBUF. Can you check once and let me know the reason for this issue? I have attached the code used for both master and slave for the reference.
Thanks,
Aditya
SPI Master
SPI Slave



