- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software: Code Composer Studio
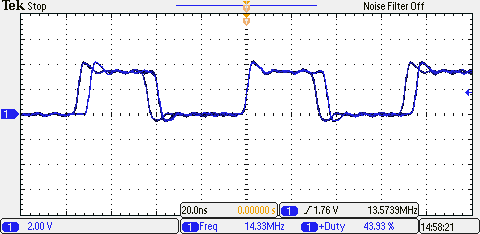
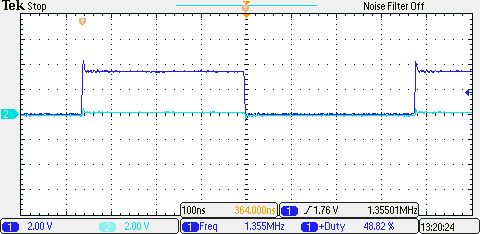
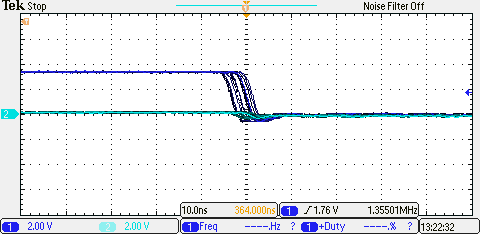
Is a sample code available for High Resolution Period and High Resolution Deadband control for a Delfino TMS320F28379D. I have tried to modify the example code hrpwm_deadband_sfo_v8.c without luck. I need to operate a full bridge inverter (H-bridge with the second bridge 180 degree phase shifted) at 13.56 MHz with 50% duty cycle and deadband control. The frequency and deadband need to be able to be finely adjustable with the high resolution of the Delfino controller. Thank you.