Part Number: TMS320F28335
Tool/software: Code Composer Studio
Dear Sir/Madam,
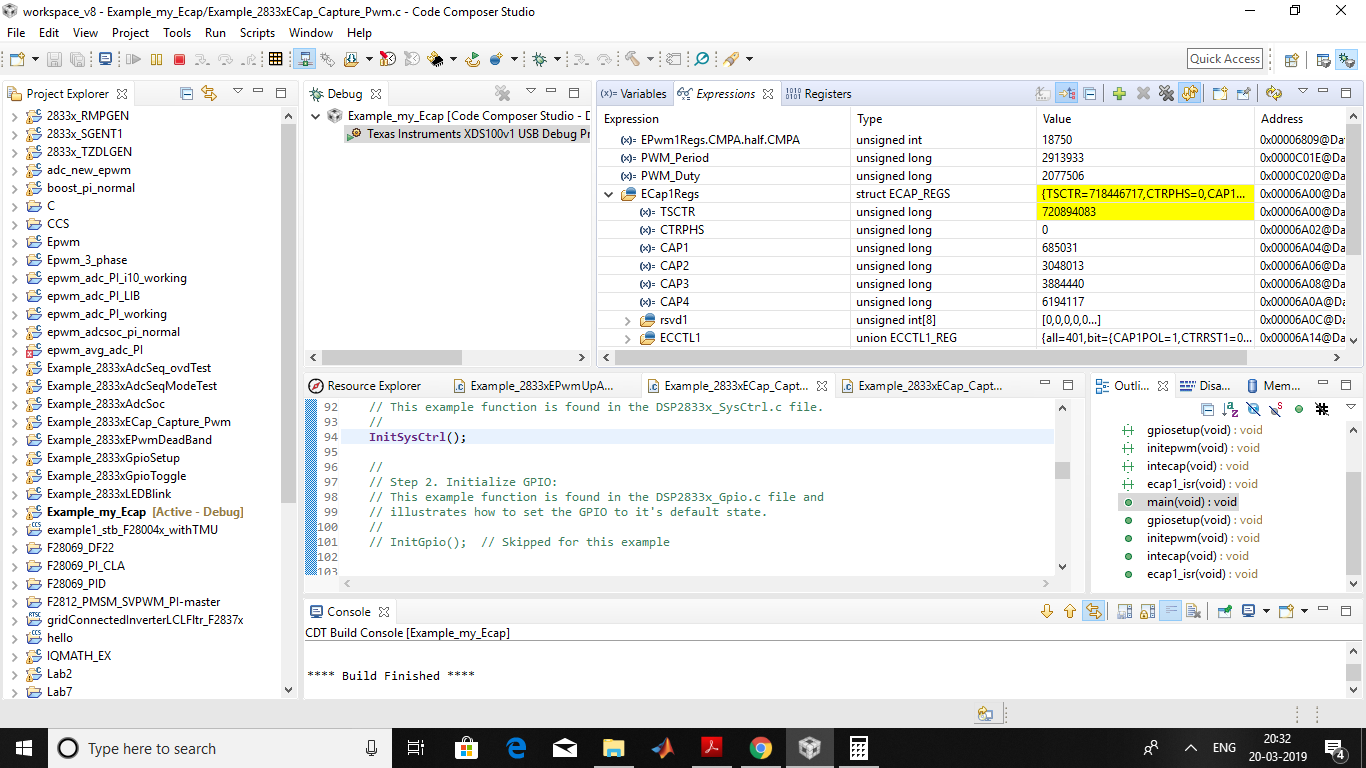
I want to capture the PWM signal from EPWM with ECap feature. I have generated a 1kHz signal from EPWM1A and I gave to the ECAP1 from pin 24. But the capture registers are always empty. The ISR is not executing. Please help me in this regard. Please find the code attached.
//########################################################################### // // FILE: Example_2833xECap_Capture_Pwm.c // // TITLE: eCap capture PWM Example // //! \addtogroup f2833x_example_list //! <h1> eCap capture PWM (ecap_capture_pwm)</h1> //! //! This example configures ePWM3A for: //! - Up count //! - Period starts at 2 and goes up to 1000 //! - Toggle output on PRD //! //! eCAP1 is configured to capture the time between rising //! and falling edge of the ePWM3A output. //! //! \b External \b Connections \n //! - eCap1 is on GPIO24 //! - ePWM3A is on GPIO4 //! - Connect GPIO4 to GPIO24. //! //! \b Watch \b Variables \n //! - ECap1IntCount - Successful captures //! - ECap1PassCount - Interrupt counts // //########################################################################### // $TI Release: F2833x Support Library v2.00.00.00 $ // $Release Date: Thu Oct 18 15:47:35 CDT 2018 $ // $Copyright: // Copyright (C) 2009-2018 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //########################################################################### // // Included Files // #include "DSP28x_Project.h" // Device Headerfile and Examples Include File Uint32 PWM_Period; Uint32 PWM_Duty; // // Defines to configure the start/end period for the timer // void gpiosetup(void); void initepwm(void); void intecap(void); // // Function Prototypes // __interrupt void ecap1_isr(void); // // Main // void main(void) { InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); gpiosetup(); initepwm(); intecap(); EALLOW; // This is needed to write to EALLOW protected registers PieVectTable.ECAP1_INT = &ecap1_isr; EDIS; // This is needed to disable write to EALLOW protected registers IER |= M_INT4; PieCtrlRegs.PIEIER4.bit.INTx1 = 1; EINT; // Enable Global interrupt INTM ERTM; // Enable Global realtime interrupt DBGM for(;;) { __asm(" NOP"); } } // // InitEPwmTimer - // void gpiosetup(void){ EALLOW; GpioCtrlRegs.GPADIR.bit.GPIO0=1; GpioCtrlRegs.GPAMUX1.bit.GPIO0=1; GpioCtrlRegs.GPAPUD.bit.GPIO0=0; GpioCtrlRegs.GPADIR.bit.GPIO24=0; GpioCtrlRegs.GPAMUX2.bit.GPIO24=1; GpioCtrlRegs.GPAPUD.bit.GPIO24=1; EDIS; } void initepwm(void){ EPwm1Regs.TBCTL.bit.CTRMODE = 2; // Count up down EPwm1Regs.TBPRD = 37500; // Set timer period EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading EPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0 EPwm1Regs.TBCTR = 0x0000; // Clear counter EPwm1Regs.TBCTL.bit.HSPCLKDIV = 001; // Clock ratio to SYSCLKOUT EPwm1Regs.TBCTL.bit.CLKDIV = 000; EPwm1Regs.TBCTL.bit.SYNCOSEL=1; EPwm1Regs.CMPA.half.CMPA =18750; // Set compare A value EPwm1Regs.CMPB = 18750; // Set Compare B value EPwm1Regs.DBCTL.bit.OUT_MODE=3; EPwm1Regs.DBCTL.bit.POLSEL=2; EPwm1Regs.DBCTL.bit.IN_MODE=0; EPwm1Regs.DBRED=200; EPwm1Regs.DBFED=200; EPwm1Regs.AQCTLA.bit.CAU=2; // Set PWM1A on Zero EPwm1Regs.AQCTLA.bit.CAD=1; EPwm1Regs.AQCTLB.bit.CBU=2; EPwm1Regs.AQCTLB.bit.CBD=1; } void intecap(void){ ECap1Regs.ECEINT.all = 0x0000; // Disable all capture interrupts ECap1Regs.ECCLR.all = 0xFFFF; // Clear all CAP interrupt flags ECap1Regs.ECCTL1.bit.CAPLDEN = 0; // Disable CAP1-CAP4 register loads ECap1Regs.ECCTL2.bit.TSCTRSTOP = 0; // Make sure the counter is stopped ECap1Regs.ECCTL2.bit.CONT_ONESHT=0; ECap1Regs.ECCTL2.bit.STOP_WRAP=3; ECap1Regs.ECCTL2.bit.REARM=0; ECap1Regs.ECCTL2.bit.TSCTRSTOP=1; ECap1Regs.ECCTL2.bit.SYNCI_EN=0; ECap1Regs.ECCTL2.bit.CAP_APWM=0; ECap1Regs.ECCTL2.bit.SYNCO_SEL=1; ECap1Regs.ECCTL1.bit.FREE_SOFT=0; ECap1Regs.ECCTL1.bit.PRESCALE=0; ECap1Regs.ECCTL1.bit.CAPLDEN=1; ECap1Regs.ECCTL1.bit.CAP1POL=1; ECap1Regs.ECCTL1.bit.CAP2POL=0; ECap1Regs.ECCTL1.bit.CAP3POL=1; ECap1Regs.ECCTL1.bit.CAP4POL=0; ECap1Regs.ECCTL1.bit.CTRRST4=1; ECap1Regs.ECEINT.bit.CEVT3=1; } __interrupt void ecap1_isr(void) { ECap1Regs.ECCLR.bit.INT=1; ECap1Regs.ECCLR.bit.CEVT3=1; PWM_Duty = (int32) ECap1Regs.CAP2 - (int32) ECap1Regs.CAP1; PWM_Period = (int32) ECap1Regs.CAP3 - (int32) ECap1Regs.CAP1; // // Acknowledge this interrupt to receive more interrupts from group 4 // PieCtrlRegs.PIEACK.all = PIEACK_GROUP4; }