


Part Number: TMS320F28035
Hi,
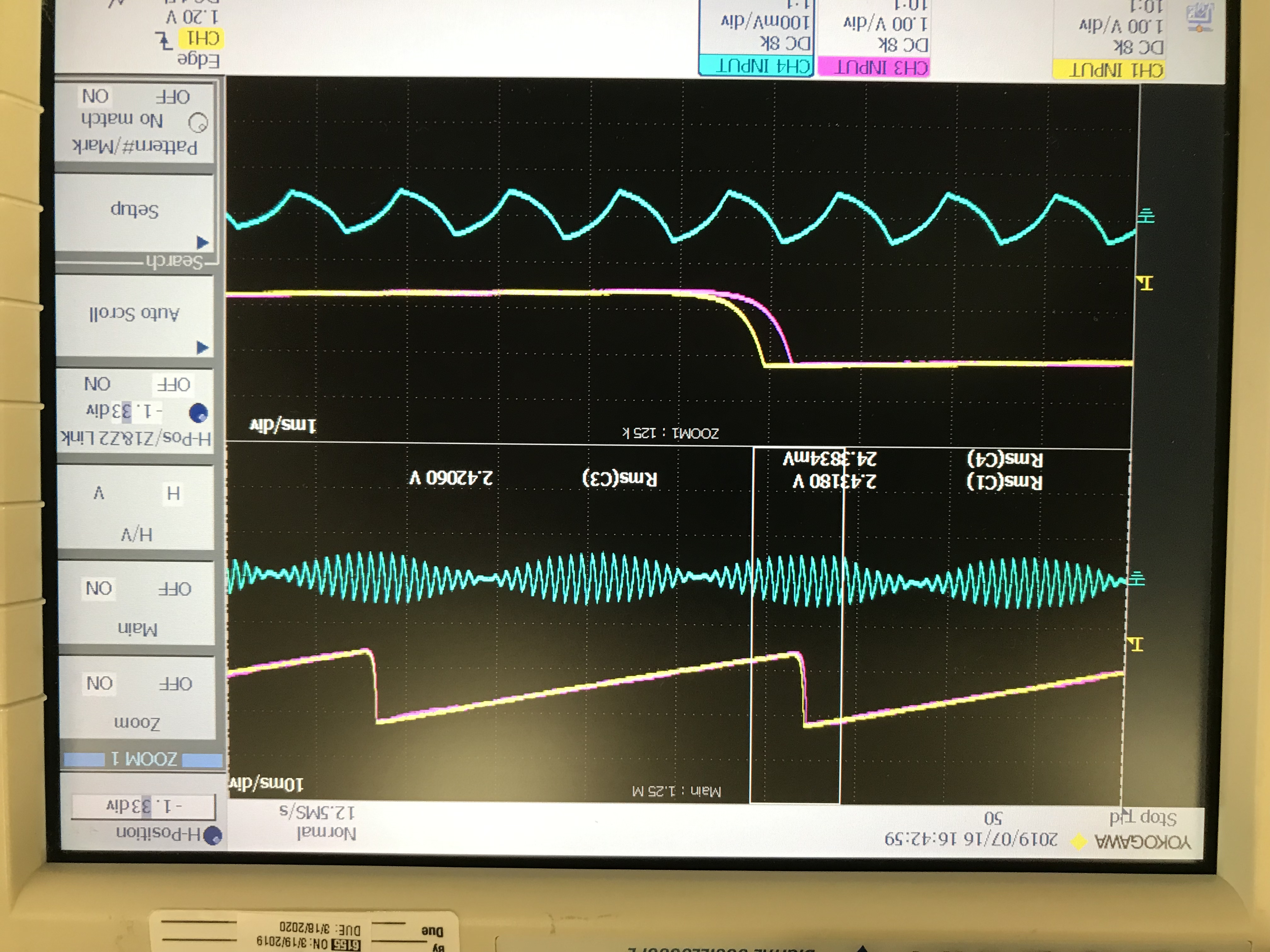
I am evaluating the HFI library and have my system functioning with some issues. I am basing the code off of the HVPM_Enhanced_Sensorless project. One issue is that the HFI algorithm goes unstable under load. Below is a plot of the encoder angle (YELLOW), the HFI angle (MAGENTA) and the phase current (CYAN) under "normal" HFI operation.
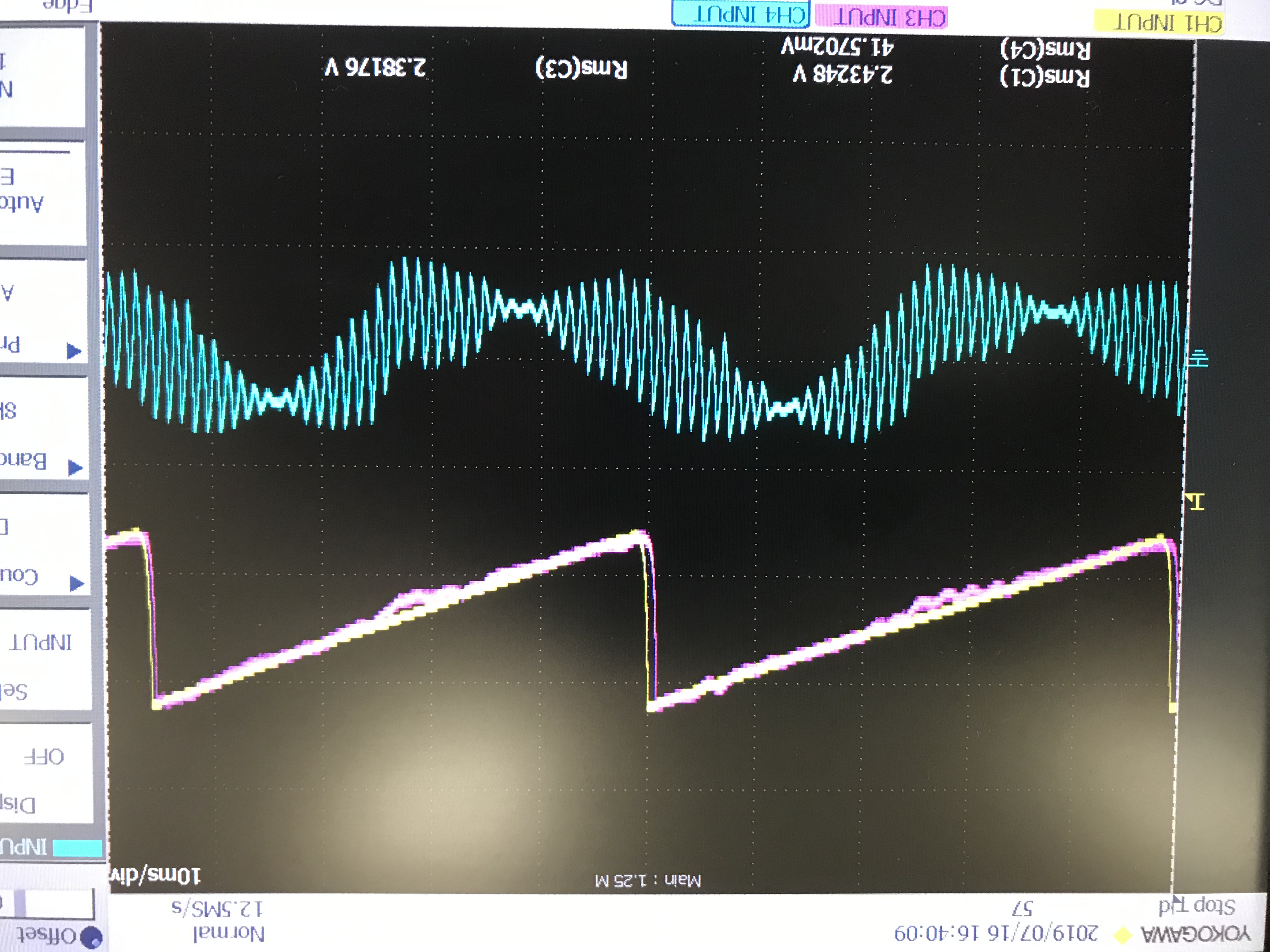
Once load is applied the HFI angle becomes corrupted and eventually (as load increases) the angle is lost the algorithm becomes unstable.

Questions:
1) Is this an indication that the motor saliency is disappearing under load?
2) Are there any suggestions or tuning tips to help deal with this situation?
Thanks,
Chris
