
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hi,
I am evaluating the HFI library and have my system functioning with some issues. One is the transition to/from HFI and eSMO angle estimates. I am basing the code off of the HVPM_Enhanced_Sensorless project.
transition1.spd = rc1.SetpointValue;
transition1.angleHFI = hfi1.thetaEst;
transition1.angleSMO = esmo1.Theta;
ANGLE_TRANSIT(&transition1);
speed2.EstimatedTheta = transition1.angle;
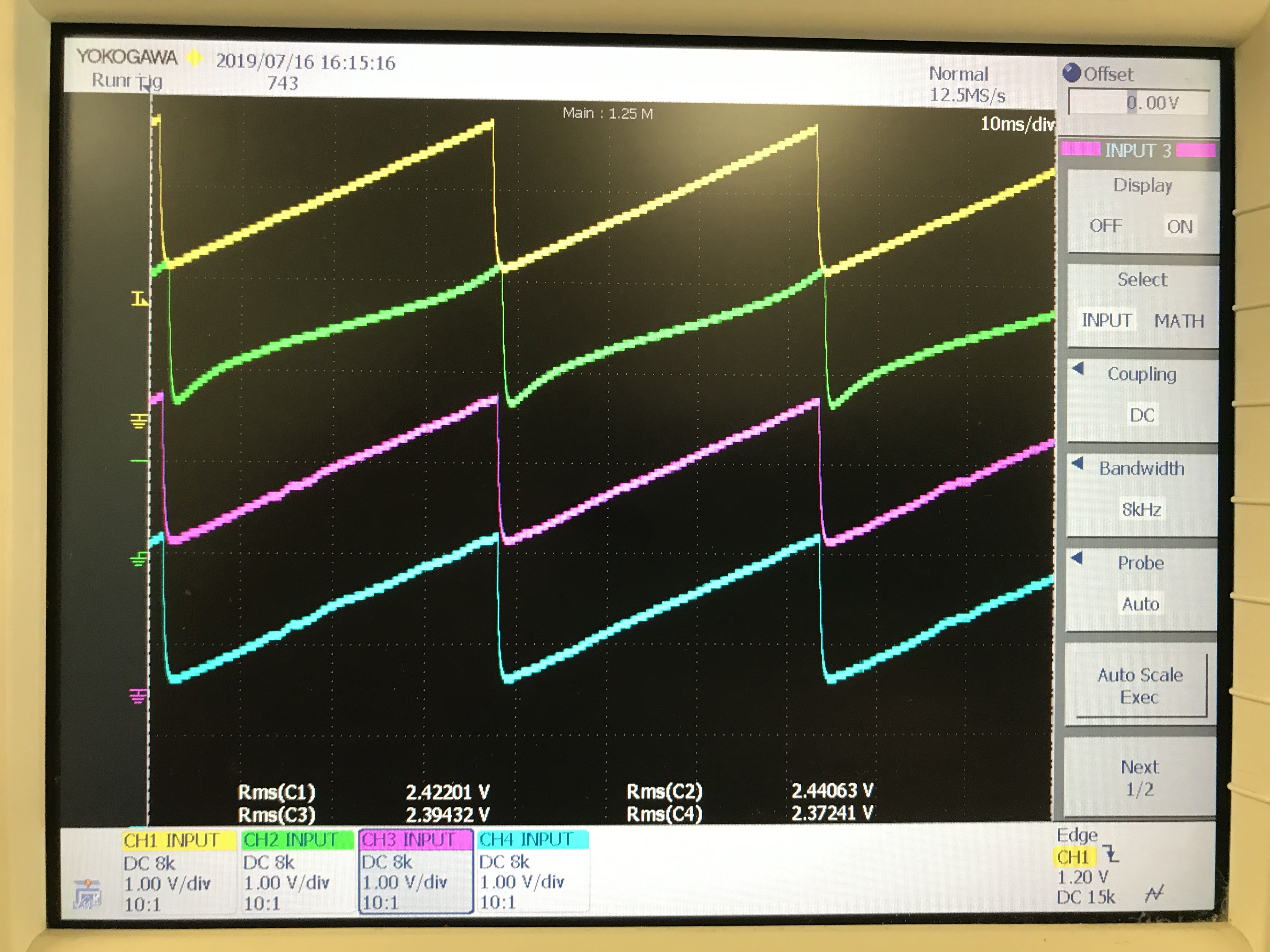
Usually the system goes from HFI to eSMO without issue, but when transitioning back the HFI algorithm goes unstable. I am observing the encoder angle (YELLOW), eSMO angle (GREEN), HFI angle (MAGENTA), and transition1.angle (CYAN) thru the DAC outputs. Seen below while under HFI control.
Once I switch to eSMO control, I noticed the HFI angle becomes unstable and is lost, per below. Perhaps this is the reason why the transition isn't working.

I have also tried to operate the system under encoder feedback and look at the HFI estimated angle and the same situation occurs, the HFI angle is all over the place. The only time the HFI solution converges is when it is actually used as commutation.
Questions:
1) Is this expected behavior?
2) Is there a way to execute the HFI in parallel while under encoder control?
Help is appreciated. Thanks!



