- We have noticed that the FAST estimated angle sawtooth shape degrades with higher speed. We have run the motor ID lab to determine the motor parameters, and at least Rs corroborates with our measurements
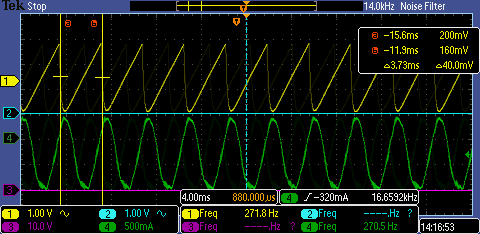
- Commanding 350 Hz (2625 RPM for our 8 pole-pair motor) results in the following:
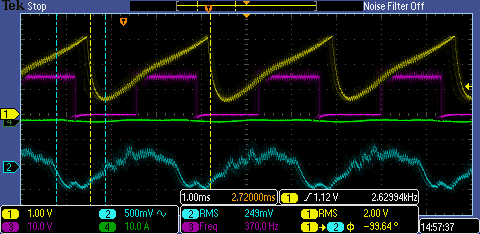
Ch1 (yellow) is estimated angle, cyan (ch3) is Hall sensor output.
The FAST estimated speed is approx 350 Hz but motor is in reality spinning at 370 Hz. Estimated angle cycle is also at 370 Hz. We believe the rounded portion is due to the 1 KHz RC filter we added at the output of the PWM and not related to the estimator speed error.
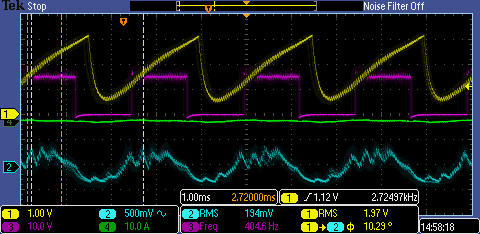
- Increasing commanded speed to 375 Hz results in the following scope trace:
Estimated angle is even more distorted and estimated speed is even further off from real speed of 400 Hz. Angle is also cycling at 400 Hz, but estimated speed is approx 375 Hz (same as commanded)
If we command 320 Hz or lower, the estimated speed corresponds to the commanded and Hall sensor speeds. Is there some input parameter or something else we could adjust in the FAST estimator to increase estimated speed accuracy at higher speeds?