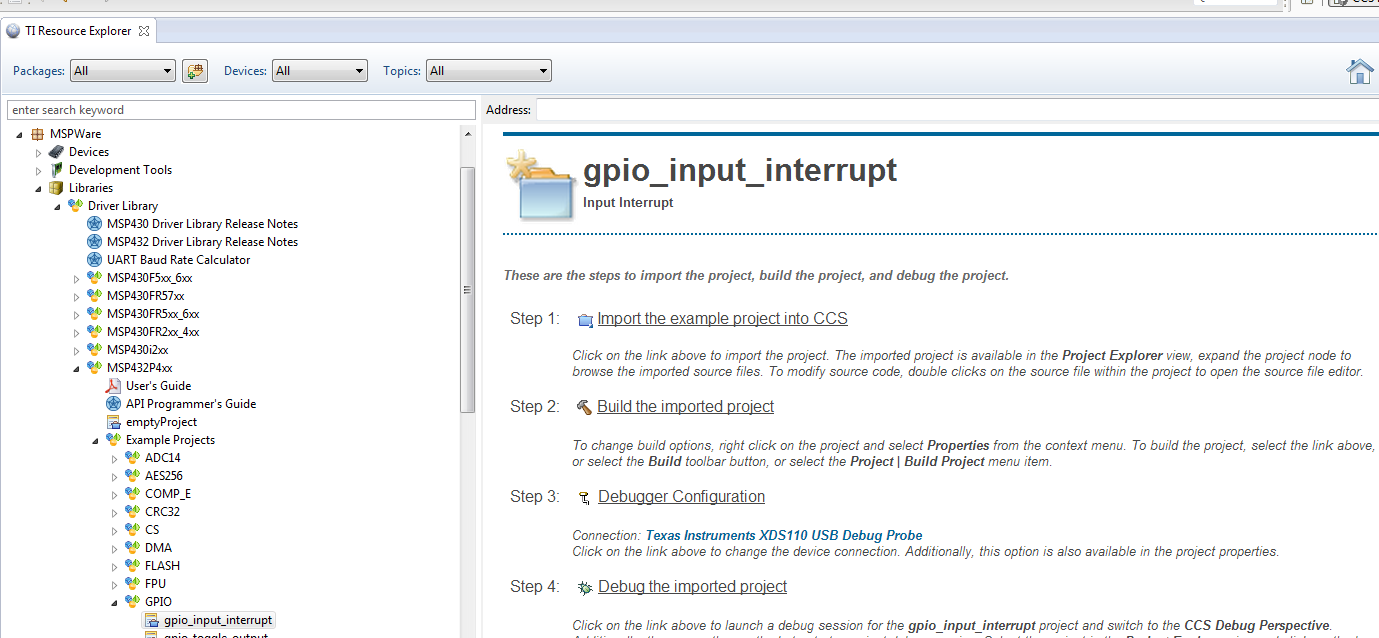
I am modifying example "msp432p401_p1_03", where an external interrupt is generated for port1.1 with the button. I'm using CCS 6.1.2.00015
I have extended this example to do the same for port2.7, with another button (for argument's sake).
But it is not working; only interrupt 1 is generated, as was provided in the example.
If I change the order in ISER[ ] the program doesn't work at all.
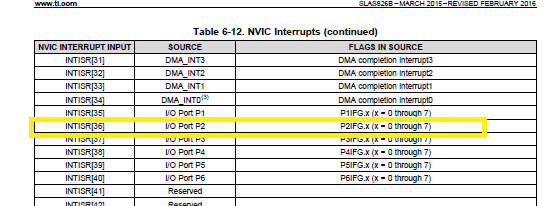
NVIC->ISER[2] = 1 << ((PORT2_IRQn) & 31);
NVIC->ISER[1] = 1 << ((PORT1_IRQn) & 31);
I also tried
NVIC_EnableIRQ(PORT1_IRQn); // Enable PORT1 Interrupt
NVIC_EnableIRQ(PORT2_IRQn); // Enable PORT2 Interrupt
but that doesn't work either: as long as interrupt 2 has not been generated, interrupt 1 works. Once interrupt 2 has been generated, interrupt 1 stops functioning.
Questions:
1) what to do?
2) does anybody know where to get information about practical use of the NVIC?
Here is the code:
#include "msp.h"
int main(void)
{
/* Hold the watchdog */
WDTCTL = WDTPW | WDTHOLD;
P1DIR = ~(uint8_t) BIT1; // p1.1 input
P2DIR = ~(uint8_t) BIT7; // p2.7 input
P1REN = BIT1; // Enable pull-up resistor P1.1
P2REN = BIT7; // Enable pull-up resistor P2.7
P1IFG = 0; // Clear all P1 interrupt flags
P2IFG = 0; // Clear all P2 interrupt flags
P1IE = BIT1; // Enable interrupt for P1.1
P2IE = BIT7; // Enable interrupt for P2.7
P1IES = BIT1; // Interrupt on high-to-low transition
P2IES = BIT7; // Interrupt on high-to-low transition
// NVIC_EnableIRQ(PORT1_IRQn); // Enable PORT1 Interrupt
// NVIC_EnableIRQ(PORT2_IRQn); // Enable PORT2 Interrupt
NVIC->ISER[2] = 1 << ((PORT2_IRQn) & 31);
NVIC->ISER[1] = 1 << ((PORT1_IRQn) & 31); // Enable Port 1 interrupt on the NVIC
/* Configure Port J */
PJDIR |= (BIT2 | BIT3); PJOUT &= ~(BIT2 | BIT3);
/* PJ.0 & PJ.1 configured for XT1 */
PJSEL0 |= BIT0 | BIT1;
PJSEL1 &= ~(BIT0 | BIT1);
/* Starting LFXT in non-bypass mode without a timeout. */
CS->KEY = CS_KEY_VAL ;
CS->CTL1 &= ~(CS_CTL1_SELA_MASK | CS_CTL1_SELB);
CS->CTL1 |= CS_CTL1_SELA__LFXTCLK; // Source LFXTCLK to ACLK & BCLK
CS->CTL2 &= ~(CS_CTL2_LFXTDRIVE_MASK); // Configure to lowest drive-strength
CS->CTL2 |= CS_CTL2_LFXT_EN;
while (CS->IFG & CS_IFG_LFXTIFG)
CS->CLRIFG |= CS_IFG_LFXTIFG;
CS->KEY = 0;
/* Turn off PSS high-side supervisors */
PSS->KEY = PSS_KEY_KEY_VAL;
PSS->CTL0 |= PSS_CTL0_SVSMHOFF;
PSS->KEY = 0;
/* Enable PCM rude mode, which allows to device to enter LPM3 without waiting for peripherals */
PCM->CTL1 = PCM_CTL0_KEY_VAL | PCM_CTL1_FORCE_LPM_ENTRY;
/* Enable all SRAM bank retentions prior to going to LPM3 */
SYSCTL->SRAM_BANKRET |= SYSCTL_SRAM_BANKRET_BNK7_RET;
__enable_interrupt();
SCB->SCR |= SCB_SCR_SLEEPONEXIT_Msk; // Do not wake up on exit from ISR
/* Setting the sleep deep bit */
SCB->SCR |= (SCB_SCR_SLEEPDEEP_Msk);
/* Go to LPM3 */
__sleep();
}
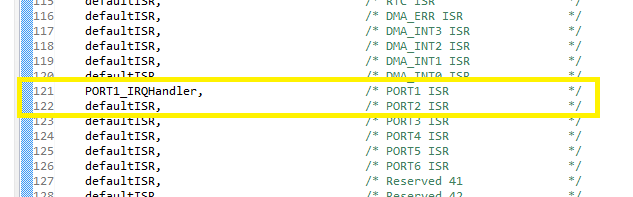
void PORT1_IRQHandler(void)
{
if(P1IFG & BIT1){
P1OUT^=BIT0;
}
P1IFG &= ~BIT1;
}
void PORT2_IRQHandler(void)
{
if(P2IFG & BIT7){
P1OUT^=BIT0;
}
P2IFG &= ~BIT7;
}