Hello,
I'm currently trying to configure the MSP430FR5969 to read from a Si1133. Communication is to be done through I2C.
My difficulty is with the proper order of configuration for this interface. From what I've read (through other discussions and datasheets), I should be able to make use of eusci_b_i2c and drivelib packages.
The user in this thread is more or less trying to accomplish the same thing.
This is how I see the process working from the Master side:
- Initialize GPIO pins (SDA, SCL)
- Initialize Master parameters
- Initialize Master
- Set the Slave Address
- Set the mode (Transmit in this case)
- Enable I2C block
- Transmit Data
- Stop
The the 'Transmit Data' Part is what I am questioning.
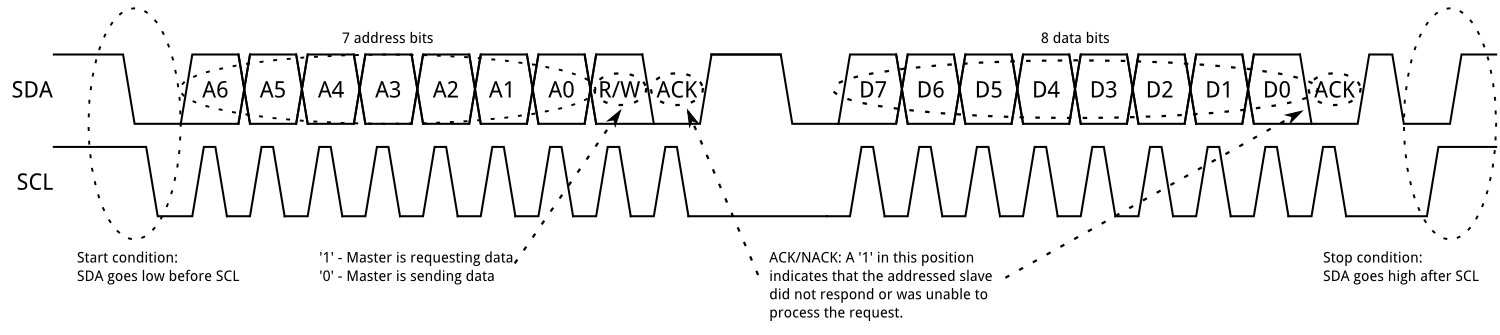
According to the Si1133 Datasheet, a simple write sequence consists of the following order of commands (from the Master):
- Start
- Send Slave Address
- Set Write
- Receive ACK
- Send Register Adress
- Receive ACK
- Send Data
- Receive ACK
- Send Stop
Now the eusci_b_i2c library provides functions that send a START, then DATA, then STOP, all in one call. But I don't believe that's what I want to do here.
As a starting point, all I would like to do is send the SLAVE Address, then read the ACK. Where exactly is the ACK sent? I imagine it's flag, just unsure of what one.
Perhaps using getInterruptStatus is a way to check?
Also, is it possible to check if the ACK was received while in Debug?
Feel free to ask for any clarification. For context, I'm a student trying to learn bare-metal C.
Thank you