- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Part Number: BOOSTXL-SENSORS
Hi team,
I am working with the red 432P launchpad and BOOSTXL-SENSORS I just received and seeing odds things. Using the latest ET-GUI from:
http://software-dl.ti.com/msp430/msp430_public_sw/mcu/msp430/BOOSTXL-SENSORS/latest/index_FDS.html
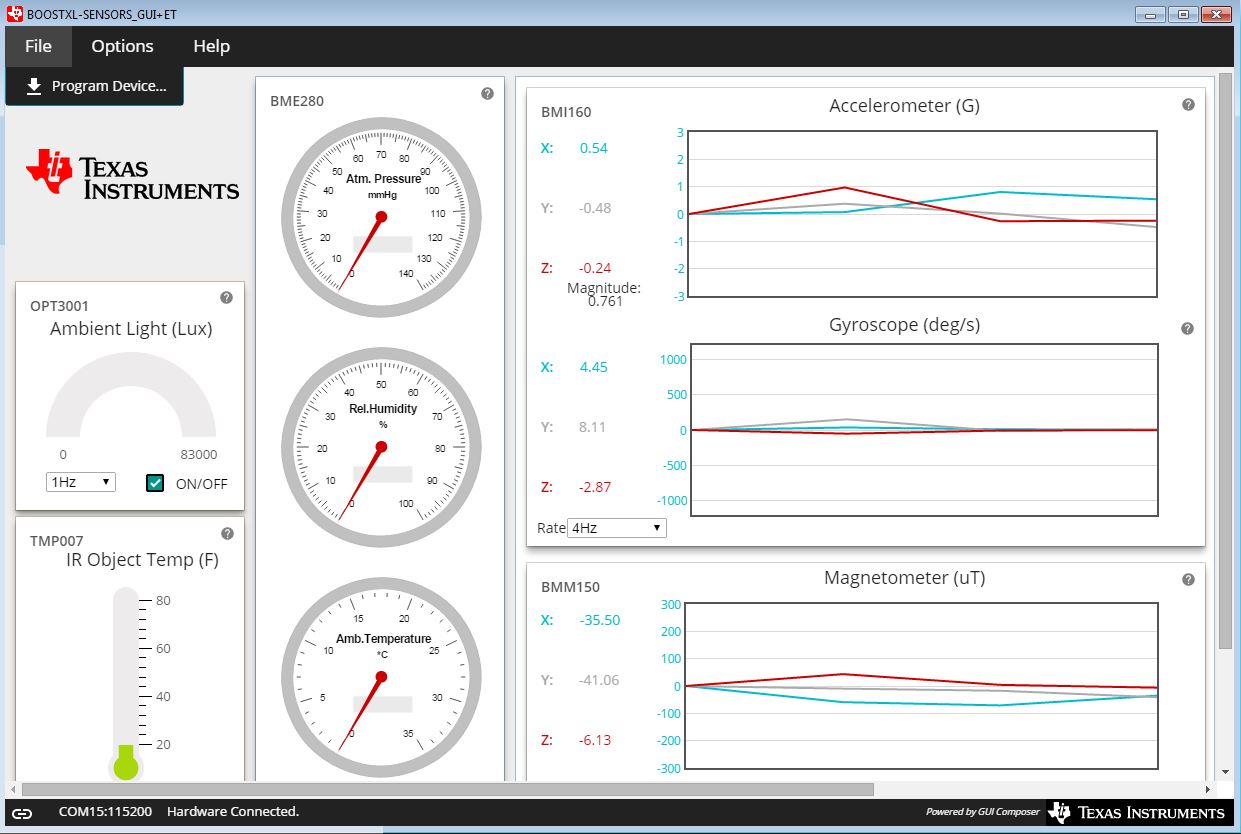
Launching the GUI, and programming it as per the users guide. Changed the baud on the GUI and Windows to 115200, used the GUI to successfully program the MCU, everything loaded fine. But the GUI always says “waiting for data”. There is nothing in the guide about needing button inputs but I started pressing them and it takes pressing S3 (which is reset?) for it to connect. Doing that allows it to connect. Still no sensor data is streaming. You have to press S3 again and you get a single momentary ping of sensor data for the accelerometer (no other sensors ever register). I have closed the GUI and unpluged/re plugged the launchpad and it’s the same. I have done nothing out of the ordinary, so I’m at a loss.
What do you suppose is going on?
Thanks,
Billy



**Attention** This is a public forum