Part Number: MSP430F5529
Hi,
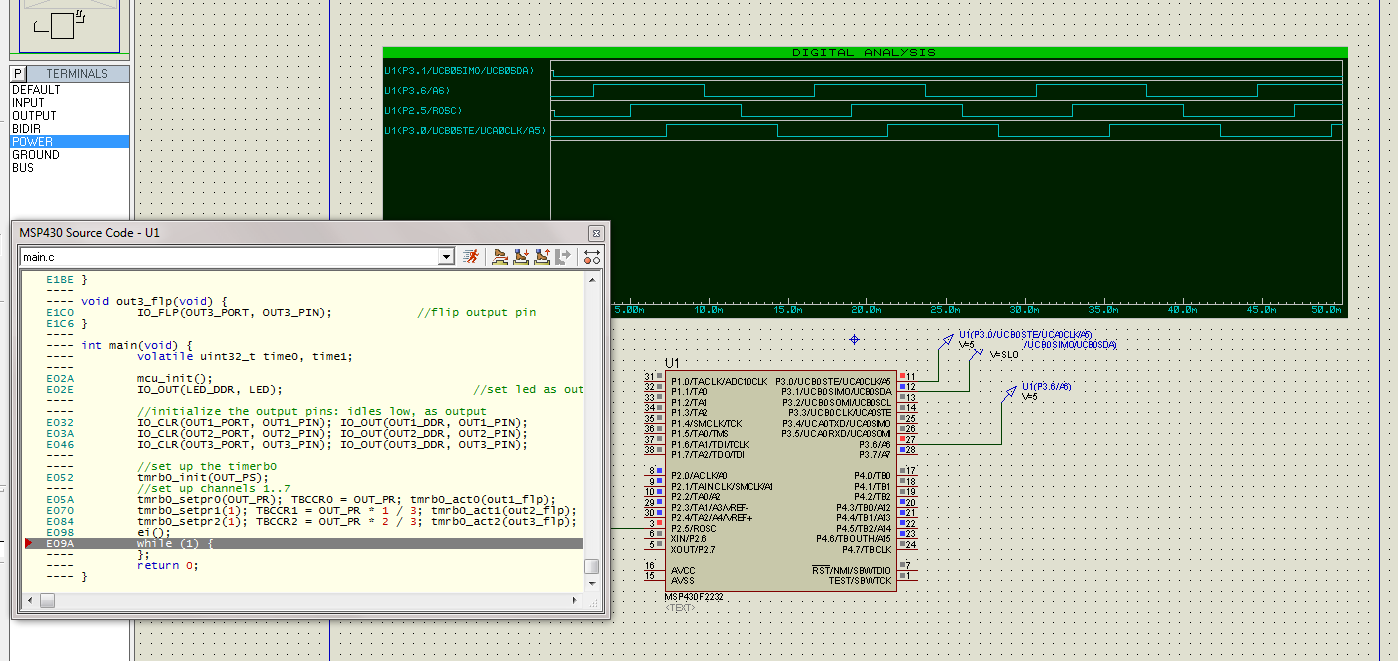
I am trying to generate 5 Square Waves shifted by 72 degrees w.r.t each other. I am using timer B in compare mode. My problem is that I am not able to initialize the initial state of the output pin. I want two of the signals to start from low and other three from high so that I can achieve the required phase shift.
Thanks
Nitish