- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Original question:

I am trying to understand the difference between using DCOCLK vs. DCOCLKDIV in the SELM field of UCSCTL4. From what I have read in the Users Guide and other resources, I expect the following:
Using DCOCLK, fDCOCLK = D x (N + 1) x (fFLLREFCLK / n)
Using DCOCLKDIV, fDCOCLKDIV = fDCOCLK / D, or fDCOCLKDIV = (N + 1) x (fFLLREFCLK / n)
where
D is the divider from the FLLD field of UCSCTL2,
N is the multiplier from the FLLN field of UCSCTL2
fFLLREFCLK is the frequency of the reference clock selected by the SELREF field of UCSCTL3
n is the divider from the FLLREFDIV field of UCSCTL3
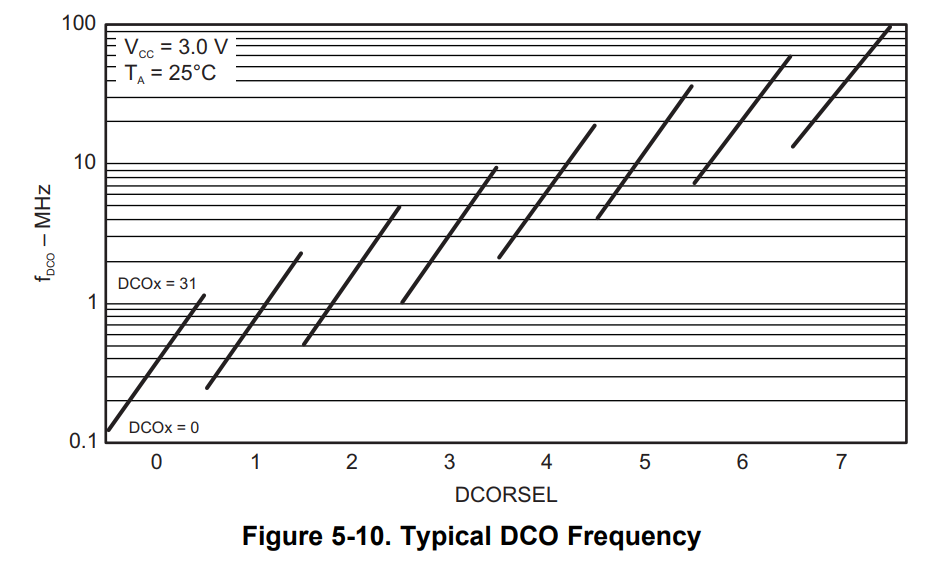
and the appropriate DCORSEL value in UCSCTL1 is chosen for the frequency range.
The problem is I see the same behavior whether I use DCOCLK or DCOCLKDIV: the LED toggles once per second either way.
UCSCTL4 |= SELA__REFOCLK + SELM__DCOCLK;
UCSCTL4 |= SELA__REFOCLK + SELM__DCOCLKDIV;
Can anyone see what I am missing?
Thanks!
Mike
Here's the code, derived from the TI demo examples:
#include <msp430.h>
int main(void)
{
WDTCTL = WDTPW+WDTHOLD; // Stop WDT
P1DIR |= BIT0; // P1.0 output to red LED
UCSCTL3 = SELREF__REFOCLK; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA__REFOCLK + SELM__DCOCLK; // Set ACLK = REFO, Select DCOCLK
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL1 = DCORSEL_5; // Select DCO range 16MHz operation
UCSCTL2 |= 249; // Set DCO Multiplier for 8MHz
// (N + 1) * FLLRef = Fdco
// (249 + 1) * 32768 = 8MHz
__bic_SR_register(SCG0); // Enable the FLL control loop
while(1)
{
P1OUT ^= BIT0;
__delay_cycles(8000000); // Delay: toggle once/s
}
}


**Attention** This is a public forum