Tool/software: Code Composer Studio
Hi,
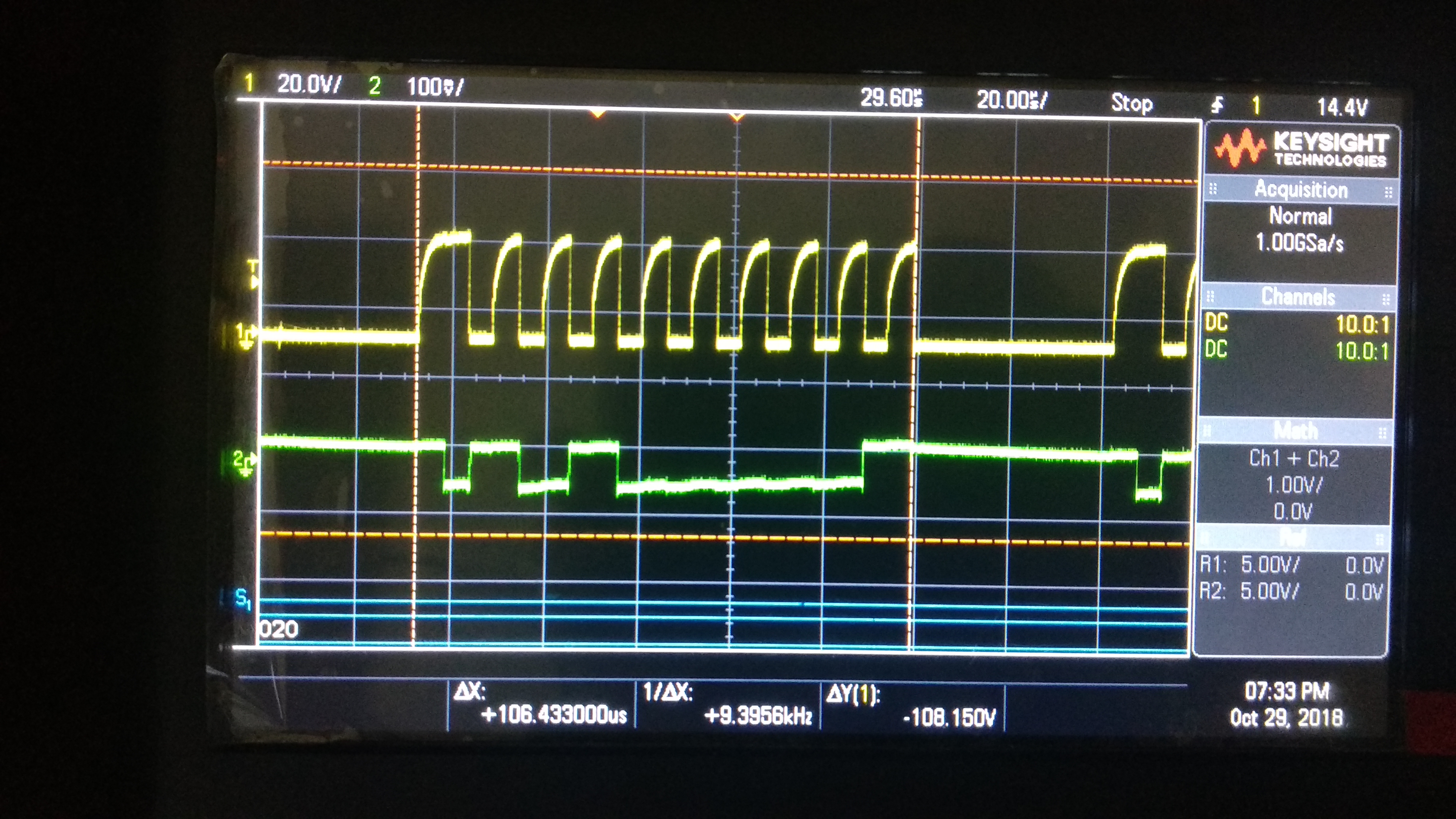
I'm trying to connect ds1307 with msp432p401r launchpad (red) using i2c protocol, but no luck.
msp432 is sending the data but not receiving ( transmit-->poll and receive--> interrupt ).
I'm using the code from the driverlib "i2c_master_rw_repeated_start-master_code"
Could you please provide me with some kind of sample code for interfacing RTC ds1307 with msp432p401r launchpad (red) using the i2c protocol.
Thanks.