


Part Number: MSP430F5529
Tool/software: Code Composer Studio
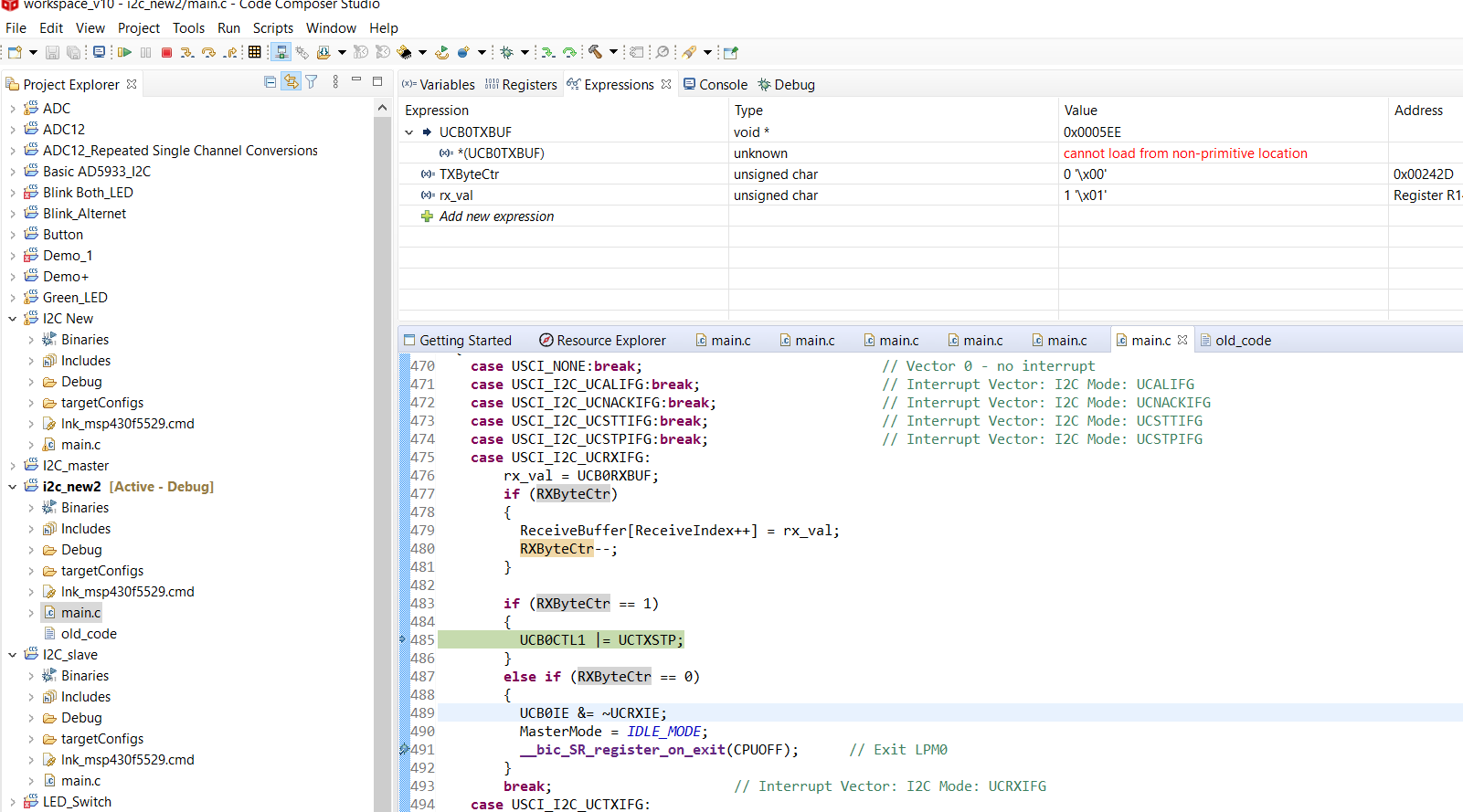
I am trying to read a register from the AD5933 ic using the sample code provided on the TI website, but it always get stuck in the data receive ISR routine at the lline as shown in the image below
i have pasted the code below,can someone point put what i am doing wrong?
#include <msp430.h>
#include <stdint.h>
#include <stdbool.h>
//******************************************************************************
// Example Commands ************************************************************
//******************************************************************************
#define SLAVE_ADDR 0x0D
/* CMD_TYPE_X_SLAVE are example commands the master sends to the slave.
* The slave will send example SlaveTypeX buffers in response.
*
* CMD_TYPE_X_MASTER are example commands the master sends to the slave.
* The slave will initialize itself to receive MasterTypeX example buffers.
* */
#define CMD_TYPE_0_SLAVE 0
#define CMD_TYPE_1_SLAVE 1
#define CMD_TYPE_2_SLAVE 2
#define CMD_TYPE_0_MASTER 3
#define CMD_TYPE_1_MASTER 4
#define CMD_TYPE_2_MASTER 5
#define TYPE_0_LENGTH 1
#define TYPE_1_LENGTH 2
#define TYPE_2_LENGTH 6
#define MAX_BUFFER_SIZE 20
/* MasterTypeX are example buffers initialized in the master, they will be
* sent by the master to the slave.
* SlaveTypeX are example buffers initialized in the slave, they will be
* sent by the slave to the master.
* */
uint8_t MasterType2 [TYPE_2_LENGTH] = {'F', '4', '1', '9', '2', 'B'};
uint8_t MasterType1 [TYPE_1_LENGTH] = { 8, 9};
uint8_t MasterType0 [TYPE_0_LENGTH] = { 11};
uint8_t SlaveType2 [TYPE_2_LENGTH] = {0};
uint8_t SlaveType1 [TYPE_1_LENGTH] = {0};
uint8_t SlaveType0 [TYPE_0_LENGTH] = {0};
//******************************************************************************
// General I2C State Machine ***************************************************
//******************************************************************************
typedef enum I2C_ModeEnum{
IDLE_MODE,
NACK_MODE,
TX_REG_ADDRESS_MODE,
RX_REG_ADDRESS_MODE,
TX_DATA_MODE,
RX_DATA_MODE,
SWITCH_TO_RX_MODE,
SWITHC_TO_TX_MODE,
TIMEOUT_MODE
} I2C_Mode;
/* Used to track the state of the software state machine*/
I2C_Mode MasterMode = IDLE_MODE;
/* The Register Address/Command to use*/
uint8_t TransmitRegAddr = 0;
/* ReceiveBuffer: Buffer used to receive data in the ISR
* RXByteCtr: Number of bytes left to receive
* ReceiveIndex: The index of the next byte to be received in ReceiveBuffer
* TransmitBuffer: Buffer used to transmit data in the ISR
* TXByteCtr: Number of bytes left to transfer
* TransmitIndex: The index of the next byte to be transmitted in TransmitBuffer
* */
uint8_t ReceiveBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t RXByteCtr = 0;
uint8_t ReceiveIndex = 0;
uint8_t TransmitBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t TXByteCtr = 0;
uint8_t TransmitIndex = 0;
/* I2C Write and Read Functions */
/* For slave device with dev_addr, writes the data specified in *reg_data
*
* dev_addr: The slave device address.
* Example: SLAVE_ADDR
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_MASTER
* *reg_data: The buffer to write
* Example: MasterType0
* count: The length of *reg_data
* Example: TYPE_0_LENGTH
* */
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count);
/* For slave device with dev_addr, read the data specified in slaves reg_addr.
* The received data is available in ReceiveBuffer
*
* dev_addr: The slave device address.
* Example: SLAVE_ADDR
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_SLAVE
* count: The length of data to read
* Example: TYPE_0_LENGTH
* */
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count);
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count);
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
UCB0CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
//Copy register data to TransmitBuffer
CopyArray(reg_data, TransmitBuffer, count);
TXByteCtr = count;
RXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
UCB0IFG &= ~(UCTXIFG + UCRXIFG); // Clear any pending interrupts
UCB0IE &= ~UCRXIE; // Disable RX interrupt
UCB0IE |= UCTXIE; // Enable TX interrupt
UCB0CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
//******************************************************************************
// Device Initialization *******************************************************
//******************************************************************************
void initClockTo16MHz()
{
UCSCTL3 |= SELREF_2; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA_2; // Set ACLK = REFO
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_5; // Select DCO range 16MHz operation
UCSCTL2 = FLLD_0 + 487; // Set DCO Multiplier for 16MHz
// (N + 1) * FLLRef = Fdco
// (487 + 1) * 32768 = 16MHz
// Set FLL Div = fDCOCLK
__bic_SR_register(SCG0); // Enable the FLL control loop
// Worst-case settling time for the DCO when the DCO range bits have been
// changed is n x 32 x 32 x f_MCLK / f_FLL_reference. See UCS chapter in 5xx
// UG for optimization.
// 32 x 32 x 16 MHz / 32,768 Hz = 500000 = MCLK cycles for DCO to settle
__delay_cycles(500000);//
// Loop until XT1,XT2 & DCO fault flag is cleared
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
uint16_t setVCoreUp(uint8_t level){
uint32_t PMMRIE_backup, SVSMHCTL_backup, SVSMLCTL_backup;
//The code flow for increasing the Vcore has been altered to work around
//the erratum FLASH37.
//Please refer to the Errata sheet to know if a specific device is affected
//DO NOT ALTER THIS FUNCTION
//Open PMM registers for write access
PMMCTL0_H = 0xA5;
//Disable dedicated Interrupts
//Backup all registers
PMMRIE_backup = PMMRIE;
PMMRIE &= ~(SVMHVLRPE | SVSHPE | SVMLVLRPE |
SVSLPE | SVMHVLRIE | SVMHIE |
SVSMHDLYIE | SVMLVLRIE | SVMLIE |
SVSMLDLYIE
);
SVSMHCTL_backup = SVSMHCTL;
SVSMLCTL_backup = SVSMLCTL;
//Clear flags
PMMIFG = 0;
//Set SVM highside to new level and check if a VCore increase is possible
SVSMHCTL = SVMHE | SVSHE | (SVSMHRRL0 * level);
//Wait until SVM highside is settled
while((PMMIFG & SVSMHDLYIFG) == 0)
{
;
}
//Clear flag
PMMIFG &= ~SVSMHDLYIFG;
//Check if a VCore increase is possible
if((PMMIFG & SVMHIFG) == SVMHIFG)
{
//-> Vcc is too low for a Vcore increase
//recover the previous settings
PMMIFG &= ~SVSMHDLYIFG;
SVSMHCTL = SVSMHCTL_backup;
//Wait until SVM highside is settled
while((PMMIFG & SVSMHDLYIFG) == 0)
{
;
}
//Clear all Flags
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG |
SVMLVLRIFG | SVMLIFG |
SVSMLDLYIFG
);
//Restore PMM interrupt enable register
PMMRIE = PMMRIE_backup;
//Lock PMM registers for write access
PMMCTL0_H = 0x00;
//return: voltage not set
return false;
}
//Set also SVS highside to new level
//Vcc is high enough for a Vcore increase
SVSMHCTL |= (SVSHRVL0 * level);
//Wait until SVM highside is settled
while((PMMIFG & SVSMHDLYIFG) == 0)
{
;
}
//Clear flag
PMMIFG &= ~SVSMHDLYIFG;
//Set VCore to new level
PMMCTL0_L = PMMCOREV0 * level;
//Set SVM, SVS low side to new level
SVSMLCTL = SVMLE | (SVSMLRRL0 * level) |
SVSLE | (SVSLRVL0 * level);
//Wait until SVM, SVS low side is settled
while((PMMIFG & SVSMLDLYIFG) == 0)
{
;
}
//Clear flag
PMMIFG &= ~SVSMLDLYIFG;
//SVS, SVM core and high side are now set to protect for the new core level
//Restore Low side settings
//Clear all other bits _except_ level settings
SVSMLCTL &= (SVSLRVL0 + SVSLRVL1 + SVSMLRRL0 +
SVSMLRRL1 + SVSMLRRL2
);
//Clear level settings in the backup register,keep all other bits
SVSMLCTL_backup &=
~(SVSLRVL0 + SVSLRVL1 + SVSMLRRL0 + SVSMLRRL1 + SVSMLRRL2);
//Restore low-side SVS monitor settings
SVSMLCTL |= SVSMLCTL_backup;
//Restore High side settings
//Clear all other bits except level settings
SVSMHCTL &= (SVSHRVL0 + SVSHRVL1 +
SVSMHRRL0 + SVSMHRRL1 +
SVSMHRRL2
);
//Clear level settings in the backup register,keep all other bits
SVSMHCTL_backup &=
~(SVSHRVL0 + SVSHRVL1 + SVSMHRRL0 + SVSMHRRL1 + SVSMHRRL2);
//Restore backup
SVSMHCTL |= SVSMHCTL_backup;
//Wait until high side, low side settled
while(((PMMIFG & SVSMLDLYIFG) == 0) &&
((PMMIFG & SVSMHDLYIFG) == 0))
{
;
}
//Clear all Flags
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG |
SVMLVLRIFG | SVMLIFG | SVSMLDLYIFG
);
//Restore PMM interrupt enable register
PMMRIE = PMMRIE_backup;
//Lock PMM registers for write access
PMMCTL0_H = 0x00;
return true;
}
bool increaseVCoreToLevel2()
{
uint8_t level = 2;
uint8_t actlevel;
bool status = true;
//Set Mask for Max. level
level &= PMMCOREV_3;
//Get actual VCore
actlevel = PMMCTL0 & PMMCOREV_3;
//step by step increase or decrease
while((level != actlevel) && (status == true))
{
if(level > actlevel)
{
status = setVCoreUp(++actlevel);
}
}
return (status);
}
void initGPIO()
{
//LEDs
P1OUT = 0x00; // P1 setup for LED & reset output
P1DIR |= BIT0;
P4DIR |= BIT7;
P4OUT &= ~(BIT7);
//I2C Pins
P3SEL |= BIT0 + BIT1; // P3.0,1 option select
}
void initI2C()
{
UCB0CTL1 |= UCSWRST; // Enable SW reset
UCB0CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous mode
UCB0CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW reset
UCB0BR0 = 160; // fSCL = SMCLK/160 = ~100kHz
UCB0BR1 = 0;
UCB0I2CSA = SLAVE_ADDR; // Slave Address is 048h
UCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
UCB0IE |= UCNACKIE;
}
//******************************************************************************
// Main ************************************************************************
// Send and receive three messages containing the example commands *************
//******************************************************************************
int main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
increaseVCoreToLevel2();
initClockTo16MHz();
initGPIO();
initI2C();
// I2C_Master_WriteReg(SLAVE_ADDR, CMD_TYPE_0_MASTER, MasterType0, TYPE_0_LENGTH);
// I2C_Master_WriteReg(SLAVE_ADDR, CMD_TYPE_1_MASTER, MasterType1, TYPE_1_LENGTH);
// I2C_Master_WriteReg(SLAVE_ADDR, CMD_TYPE_2_MASTER, MasterType2, TYPE_2_LENGTH);
I2C_Master_ReadReg(SLAVE_ADDR, 0x8f, TYPE_0_LENGTH);
CopyArray(ReceiveBuffer, SlaveType0, TYPE_0_LENGTH);
// I2C_Master_ReadReg(SLAVE_ADDR, CMD_TYPE_1_SLAVE, TYPE_1_LENGTH);
// CopyArray(ReceiveBuffer, SlaveType1, TYPE_1_LENGTH);
//
// I2C_Master_ReadReg(SLAVE_ADDR, CMD_TYPE_2_SLAVE, TYPE_2_LENGTH);
// CopyArray(ReceiveBuffer, SlaveType2, TYPE_2_LENGTH);
__bis_SR_register(LPM0_bits + GIE);
return 0;
}
//******************************************************************************
// I2C Interrupt ***************************************************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_B0_VECTOR
__interrupt void USCI_B0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_B0_VECTOR))) USCI_B0_ISR (void)
#else
#error Compiler not supported!
#endif
{
//Must read from UCB0RXBUF
uint8_t rx_val = 0;
switch(__even_in_range(UCB0IV,0xC))
{
case USCI_NONE:break; // Vector 0 - no interrupt
case USCI_I2C_UCALIFG:break; // Interrupt Vector: I2C Mode: UCALIFG
case USCI_I2C_UCNACKIFG:break; // Interrupt Vector: I2C Mode: UCNACKIFG
case USCI_I2C_UCSTTIFG:break; // Interrupt Vector: I2C Mode: UCSTTIFG
case USCI_I2C_UCSTPIFG:break; // Interrupt Vector: I2C Mode: UCSTPIFG
case USCI_I2C_UCRXIFG:
rx_val = UCB0RXBUF;
if (RXByteCtr)
{
ReceiveBuffer[ReceiveIndex++] = rx_val;
RXByteCtr--;
}
if (RXByteCtr == 1)
{
UCB0CTL1 |= UCTXSTP;
}
else if (RXByteCtr == 0)
{
UCB0IE &= ~UCRXIE;
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
break; // Interrupt Vector: I2C Mode: UCRXIFG
case USCI_I2C_UCTXIFG:
switch (MasterMode)
{
case TX_REG_ADDRESS_MODE:
UCB0TXBUF = TransmitRegAddr;
if (RXByteCtr)
MasterMode = SWITCH_TO_RX_MODE; // Need to start receiving now
else
MasterMode = TX_DATA_MODE; // Continue to transmission with the data in Transmit Buffer
break;
case SWITCH_TO_RX_MODE:
UCB0IE |= UCRXIE; // Enable RX interrupt
UCB0IE &= ~UCTXIE; // Disable TX interrupt
UCB0CTL1 &= ~UCTR; // Switch to receiver
MasterMode = RX_DATA_MODE; // State state is to receive data
UCB0CTL1 |= UCTXSTT; // Send repeated start
if (RXByteCtr == 1)
{
//Must send stop since this is the N-1 byte
while((UCB0CTL1 & UCTXSTT));
UCB0CTL1 |= UCTXSTP; // Send stop condition
}
break;
case TX_DATA_MODE:
if (TXByteCtr)
{
UCB0TXBUF = TransmitBuffer[TransmitIndex++];
TXByteCtr--;
}
else
{
//Done with transmission
UCB0CTL1 |= UCTXSTP; // Send stop condition
MasterMode = IDLE_MODE;
UCB0IE &= ~UCTXIE; // disable TX interrupt
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
break;
default:
__no_operation();
break;
}
break; // Interrupt Vector: I2C Mode: UCTXIFG
default: break;
}
}

