Part Number: TM4C1294NCPDT
Tool/software: TI-RTOS
Respected sir,
I am using all the SSI modules. SSI 0,2,3 works fine but SSI1 crashes at SPI_transfer(). After debugging i found the problem in following statement in SPITivaDMA.c file.
if (!Semaphore_pend(Semaphore_handle(&(object->transferComplete)),
object->transferTimeout))
I have tried following solution from Forum
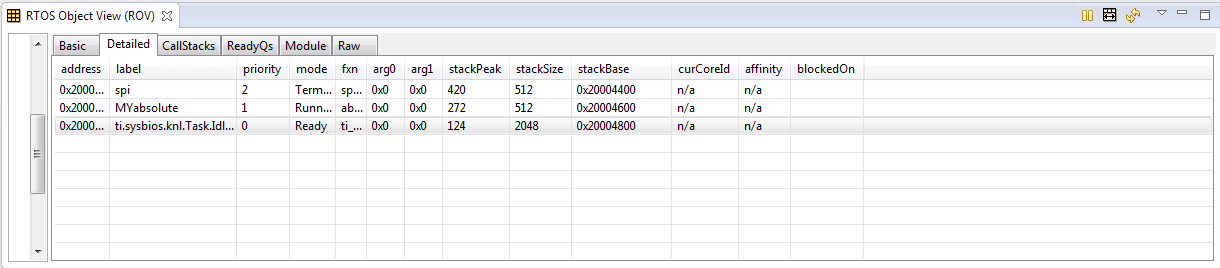
1. Selecting right device in properties->general->device. 2. I have used ROV for stack level checking but all stacks seems ok. 3. I have increased stack size for HWI.
But none of above works. I have attached snaps of ROV and SSI module configuration code.
Void spiFxn (UArg arg0, UArg arg1)
{
// SPI_Handle masterSpi;
// SPI_Transaction masterTransaction;
// bool transferOK;
//************************************SPI FOR DAC*************************************
/* Initialize SPI handle as default master */
SPI_Params spiParamsdac;
SPI_Params_init(&spiParamsdac);
spiParamsdac.transferMode = SPI_MODE_BLOCKING;
spiParamsdac.transferTimeout = SPI_WAIT_FOREVER;
spiParamsdac.transferCallbackFxn = NULL;
spiParamsdac.mode = SPI_MASTER;
spiParamsdac.bitRate = 1000000;
spiParamsdac.dataSize =8;
spiParamsdac.frameFormat =SPI_POL1_PHA1;
spiParamsdac.custom =(uintptr_t) NULL;
masterSpi = SPI_open(Board_SPI1, &spiParamsdac); // change the cs pin to GPIO???????
if (masterSpi == NULL) {
System_abort("Error initializing DAC_SPI\n");
}
else {
// System_printf("DAC_SPI initialized\n");
// System_flush();
}
/* Initialize master SPI transaction structure */
masterTransaction.count = SPI_MSG_LENGTH;
masterTransaction.txBuf = (Ptr)masterTxBuffer;
masterTransaction.rxBuf = (Ptr)masterRxBuffer;
GPIO_write(Board_LDAC, 0); // LDAC PIN OF DAC ALWAYS KEEP LOW
//***************************SPI FOR ADC*************************************************
SPI_Params spiParams;
SPI_Params_init(&spiParams);
spiParams.transferMode = SPI_MODE_BLOCKING;
spiParams.transferTimeout = SPI_WAIT_FOREVER;
spiParams.transferCallbackFxn = NULL;
spiParams.mode = SPI_MASTER;
spiParams.bitRate = 1000000;
spiParams.dataSize =16;
spiParams.frameFormat =SPI_POL1_PHA0;
spiParams.custom =(uintptr_t) NULL;
adcSpi = SPI_open(Board_SPI0, &spiParams);
if (adcSpi == NULL) {
System_abort("Error initializing ADC_SPI\n");
}
else {
// System_printf("ADC_SPI initialized\n");
// System_flush();
}
/* Initialize master SPI transaction structure */
adcTransaction.count = ADC_SPI_MSG_LENGTH;
adcTransaction.txBuf = (Ptr)adcTxBuffer;
adcTransaction.rxBuf = (Ptr)adcRxBuffer;
// GPIO_write(Board_ADC_CONVST, Board_LED_ON);
// User specific code, enable interrupts:
Xint1Count = 0; // Count XINT1 interrupts
TimerCount = 0; // Count Timer0 interrupts
LoopCount = 0; // Count times through idle loop
Flag = 0;
Reg_Word = 0;
// Initialize Buffer Tables
for (n=0; n<BUF_SIZE; n++)
{
ADS833x_Buf[n] = n;
}
for (n=0; n<SIZE; n++)
{
ADS833x_Result[n] = n;
}
ADS833x_init();
// Step 6. IDLE loop:
// Select input Channel if Manual Channel Selection is enabled in CFR register
ADS833x_Buf[2] = ADS833x_CFR_Reg & 0x0800;
if (ADS833x_Buf[2] == 0)
{
System_printf("\n manual channel select\n");
System_flush();
Channel_Number = 0; // Should be 0~7,Channel number for Manual channel select
ADS833x_Channel_Select(Channel_Number); // Select ADC input channel
}
timerFlag = 1;
//**************************************************END ADC******************************************************
//**************************************************ABSOLUTE ENCODER*************************************
//**************************************************Channel 0*************************************
SPI_Params spiParamsabsa;
SPI_Params_init(&spiParamsabsa);
spiParamsabsa.transferMode = SPI_MODE_BLOCKING;
spiParamsabsa.transferTimeout = SPI_WAIT_FOREVER;
spiParamsabsa.transferCallbackFxn = NULL;
spiParamsabsa.mode = SPI_MASTER;
spiParamsabsa.bitRate = 295000; //295K
spiParamsabsa.dataSize =16;
spiParamsabsa.frameFormat = SPI_POL1_PHA1;
spiParamsabsa.custom =(uintptr_t) NULL;
absaSpi = SPI_open(Board_SPI2, &spiParamsabsa);
if (absaSpi == NULL) {
System_abort("Error initializing ABSA_SPI\n");
}
else {
System_printf("ABSA_SPI initialized\n");
System_flush();
}
/* Initialize master SPI transaction structure */
absaTransaction.count = ABSA_SPI_MSG_LENGTH;
absaTransaction.txBuf = (Ptr)absaTxBuffer;
absaTransaction.rxBuf = (Ptr)absaRxBuffer;
//**************************************************Channel 1*************************************
SPI_Params spiParamsabsb;
SPI_Params_init(&spiParamsabsb);
spiParamsabsb.transferMode = SPI_MODE_BLOCKING;
spiParamsabsb.transferTimeout = SPI_WAIT_FOREVER;
spiParamsabsb.transferCallbackFxn = NULL;
spiParamsabsb.mode = SPI_MASTER;
spiParamsabsb.bitRate = 250000;
spiParamsabsb.dataSize =16;
spiParamsabsb.frameFormat =SPI_POL1_PHA0;
spiParamsabsb.custom =(uintptr_t) NULL;
absbSpi = SPI_open(Board_SPI3, &spiParamsabsb);
if (absbSpi == NULL) {
System_abort("Error initializing ABSB_SPI\n");
}
else {
System_printf("ABSB_SPI initialized\n");
System_flush();
}
/* Initialize master SPI transaction structure */
absbTransaction.count = ABSB_SPI_MSG_LENGTH;
absbTransaction.txBuf = (Ptr)absbTxBuffer;
absbTransaction.rxBuf = (Ptr)absbRxBuffer;
//**************************************************END ABSOLUTE ENCODER*************************************
}
/*
* =============================== SPI ===============================
*/
/* Place into subsections to allow the TI linker to remove items properly */
#if defined(__TI_COMPILER_VERSION__)
#pragma DATA_SECTION(SPI_config, ".const:SPI_config")
#pragma DATA_SECTION(spiTivaDMAHWAttrs, ".const:spiTivaDMAHWAttrs")
#endif
#include <ti/drivers/SPI.h>
#include <ti/drivers/spi/SPITivaDMA.h>
SPITivaDMA_Object spiTivaDMAObjects[EK_TM4C1294XL_SPICOUNT];
#if defined(__TI_COMPILER_VERSION__)
#pragma DATA_ALIGN(spiTivaDMAscratchBuf, 32)
#elif defined(__IAR_SYSTEMS_ICC__)
#pragma data_alignment=32
#elif defined(__GNUC__)
__attribute__ ((aligned (32)))
#endif
uint32_t spiTivaDMAscratchBuf[EK_TM4C1294XL_SPICOUNT];
const SPITivaDMA_HWAttrs spiTivaDMAHWAttrs[EK_TM4C1294XL_SPICOUNT] = {
{
.baseAddr = SSI2_BASE,
.intNum = INT_SSI2,
.intPriority = (~0),
.scratchBufPtr = &spiTivaDMAscratchBuf[0],
.defaultTxBufValue = 0,
.rxChannelIndex = UDMA_SEC_CHANNEL_UART2RX_12,
.txChannelIndex = UDMA_SEC_CHANNEL_UART2TX_13,
.channelMappingFxn = uDMAChannelAssign,
.rxChannelMappingFxnArg = UDMA_CH12_SSI2RX,
.txChannelMappingFxnArg = UDMA_CH13_SSI2TX
},
{
.baseAddr = SSI3_BASE,
.intNum = INT_SSI3,
.intPriority = (~0),
.scratchBufPtr = &spiTivaDMAscratchBuf[1],
.defaultTxBufValue = 0,
.rxChannelIndex = UDMA_SEC_CHANNEL_TMR2A_14,
.txChannelIndex = UDMA_SEC_CHANNEL_TMR2B_15,
.channelMappingFxn = uDMAChannelAssign,
.rxChannelMappingFxnArg = UDMA_CH14_SSI3RX,
.txChannelMappingFxnArg = UDMA_CH15_SSI3TX
},
{
.baseAddr = SSI0_BASE,
.intNum = INT_SSI0,
.intPriority = (~0),
.scratchBufPtr = &spiTivaDMAscratchBuf[2],
.defaultTxBufValue = 0,
.rxChannelIndex = UDMA_SEC_CHANNEL_SSI1RX,
.txChannelIndex = UDMA_SEC_CHANNEL_SSI1TX,
.channelMappingFxn = uDMAChannelAssign,
.rxChannelMappingFxnArg = UDMA_CH10_SSI0RX,
.txChannelMappingFxnArg = UDMA_CH11_SSI0TX
},
{
.baseAddr = SSI1_BASE,
.intNum = INT_SSI1,
.intPriority = (~0),
.scratchBufPtr = &spiTivaDMAscratchBuf[3],
.defaultTxBufValue = 0,
.rxChannelIndex = UDMA_SEC_CHANNEL_SSI1RX,
.txChannelIndex = UDMA_SEC_CHANNEL_SSI1TX,
.channelMappingFxn = uDMAChannelAssign,
.rxChannelMappingFxnArg = UDMA_CH10_SSI1RX,
.txChannelMappingFxnArg = UDMA_CH11_SSI1TX
}
};
const SPI_Config SPI_config[] = {
{
.fxnTablePtr = &SPITivaDMA_fxnTable,
.object = &spiTivaDMAObjects[0],
.hwAttrs = &spiTivaDMAHWAttrs[0]
},
{
.fxnTablePtr = &SPITivaDMA_fxnTable,
.object = &spiTivaDMAObjects[1],
.hwAttrs = &spiTivaDMAHWAttrs[1]
},
{
.fxnTablePtr = &SPITivaDMA_fxnTable,
.object = &spiTivaDMAObjects[2],
.hwAttrs = &spiTivaDMAHWAttrs[2]
},
{
.fxnTablePtr = &SPITivaDMA_fxnTable,
.object = &spiTivaDMAObjects[3],
.hwAttrs = &spiTivaDMAHWAttrs[3]
},
{NULL, NULL, NULL}
};
/*
* ======== EK_TM4C1294XL_initSPI ========
*/
void EK_TM4C1294XL_initSPI(void)
{
/* SSI2 */
/*
* NOTE: TI-RTOS examples configure pins PD0 & PD1 for SSI2 or I2C7. Thus,
* a conflict occurs when the I2C & SPI drivers are used simultaneously in
* an application. Modify the pin mux settings in this file and resolve the
* conflict before running your the application.
*/
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI2);
GPIOPinConfigure(GPIO_PD3_SSI2CLK);
GPIOPinConfigure(GPIO_PD2_SSI2FSS);
GPIOPinConfigure(GPIO_PD1_SSI2XDAT0);
GPIOPinConfigure(GPIO_PD0_SSI2XDAT1);
GPIOPinTypeSSI(GPIO_PORTD_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_2 | GPIO_PIN_3);
// GPIOPinTypeGPIOOutput(GPIO_PORTD_BASE,GPIO_PIN_2);
// GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_2, 4);
/* SSI3 */
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3);
GPIOPinConfigure(GPIO_PQ0_SSI3CLK);
//GPIOPinConfigure(GPIO_PQ1_SSI3FSS);
GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0);
GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1);
GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_0 |GPIO_PIN_2 | GPIO_PIN_3);
GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE,GPIO_PIN_1);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1,2);
//********************************SSI0*************************************************************************
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
GPIOPinConfigure(GPIO_PA2_SSI0CLK);
GPIOPinConfigure(GPIO_PA3_SSI0FSS);
GPIOPinConfigure(GPIO_PA4_SSI0XDAT0);
GPIOPinConfigure(GPIO_PA5_SSI0XDAT1);
GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5);
//********************************SSI1*************************************************************************
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI1);
GPIOPinConfigure(GPIO_PB5_SSI1CLK);
GPIOPinConfigure(GPIO_PB4_SSI1FSS);
GPIOPinConfigure(GPIO_PE4_SSI1XDAT0);
GPIOPinConfigure(GPIO_PE5_SSI1XDAT1);
GPIOPinTypeSSI(GPIO_PORTB_BASE, GPIO_PIN_4 | GPIO_PIN_5);
GPIOPinTypeSSI(GPIO_PORTE_BASE, GPIO_PIN_4 |GPIO_PIN_5);
EK_TM4C1294XL_initDMA();
SPI_init();
}