Other Parts Discussed in Thread: DRV8316
Hi
I'm porting DMC library for sensor less FOC to my NXPs MPU to drive DRV8316R for BLDC motor.
I'm reading, SPRABQ3.pdf and SPRABQ4.pdf. Mostly both documents have same contents.
Now, I testing Level-5 system build. But, when switch to closed speed loop from closed current loop, motor slow down and stop.
It seems that, when use estimated theta (SMO), motor slow down and stop.
If use the internally generated theta (from RG MACRO), the motor will not stop.
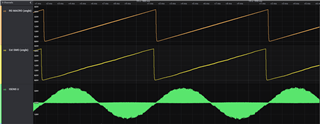
There is a phase difference between the two thetas, which seems to be a factor that causes them to stop when the control is switched.
I would like to know how the estimated theta (SMO) phase delay should be adjusted.
※Also I post the RG MACRO output and Measured theta (SMO).