Hi there
I am using a custom made MCT8316R PCB (spi version) with STM32G0 controller , for my application. The system is running at 24 V.
I am facing following problems:
1. I am getting motor lock error according to the status registers and it is not being cleared even if I clear all the errors upon startup.
2. If I am clearing all errors in my code by clearing the clr_flt bit, the npor bit is getting set.
So , in both the conditions due to the errors , i am unable to drive the motor.
Some key observations are:
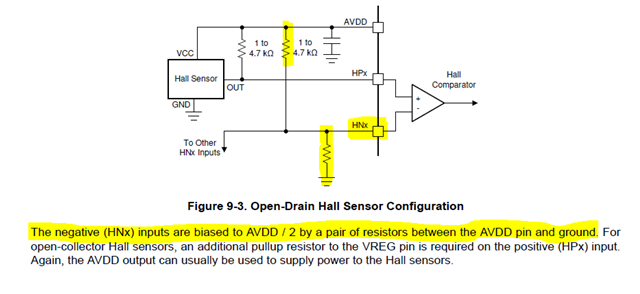
1. According to datasheet, MCT should show motor lock error only when it is not getting hall sensor inputs but I have physically verified using oscilloscope that this is not the case.
2. One more observation id that I also tried increasing the motor lock detection time to maximum, then I observed that the motor lock error indication flag was not being set but the motor was still not running. I have also tried retry on motor lock but still the issue persists.
3. I am straightaway providing 30 KHz PWM after configuring MCT just for testing purpose. I am using 1x PWM, and synchronous rectification with digital hall along with mostly default settings mentioned below:
register address - value
0x03 - 0x03
0x04 - 0x86
0x05 - 0x47
0x06 - 0x14
0x04 - 0x01
0x0a - 0x40
4. I am disabling the buck regulator at startup while its components are mounted on PCB.
5. Charge pump voltage is coming 29 V (Vm + 5)
6. AVDD is 3.3 V.
7. SPI is working fine and PWM from controller is also getting generated as it should be.
Any leads on what could be the reason for this will be helpful.
Thank you.