Hi Team
I want to know how to tune the speed loop.
First I have few questions about GUI tool.
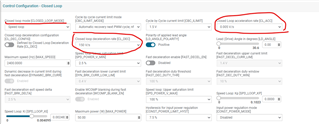
Q1. When KP is changed with KI=0, there is no speed change even if the speed command value is changed.
When changing KI with KP=0, speed changes depending on the speed command value. And also overshoot can be confirmed.
I think that the parameter setting is reversed from the phenomenon.

Q2. CL_ACC and CA_DEC is valid when use speed loop as CLOSE_LOOP_MODE?
In my environment, it seems only valid when select "disable" as CLOSED_LOOP_MODE.
I use this version.