Other Parts Discussed in Thread: DRV8323
Hi team,
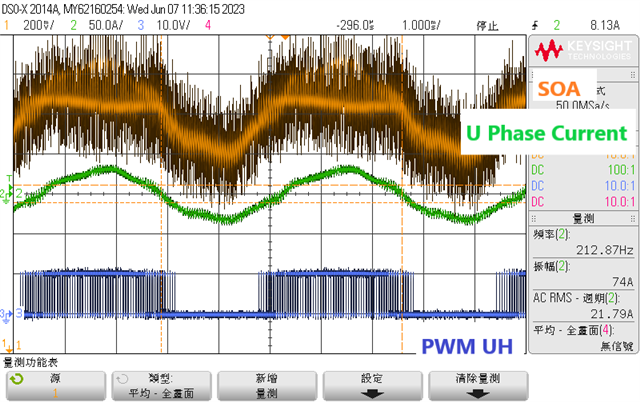
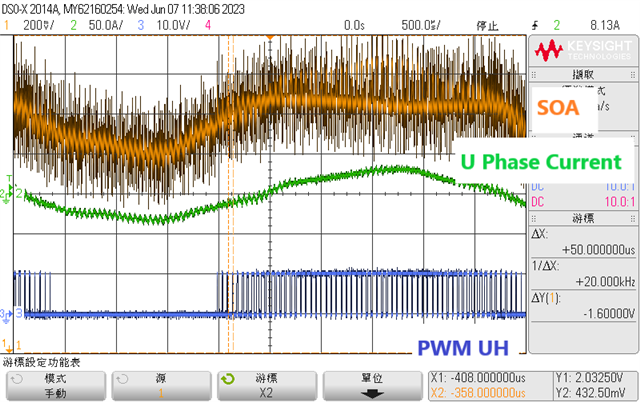
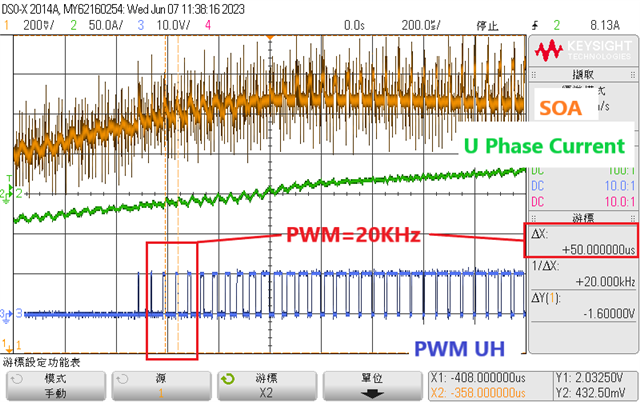
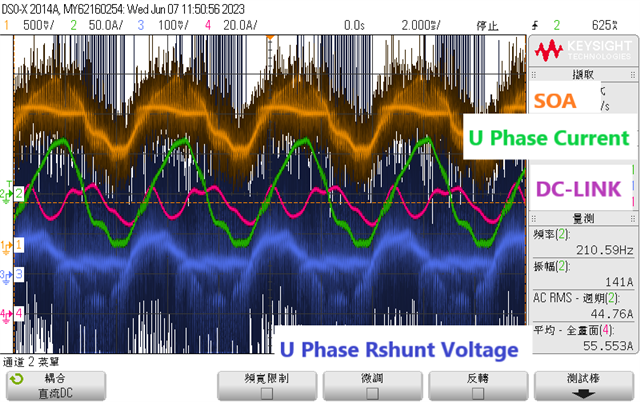
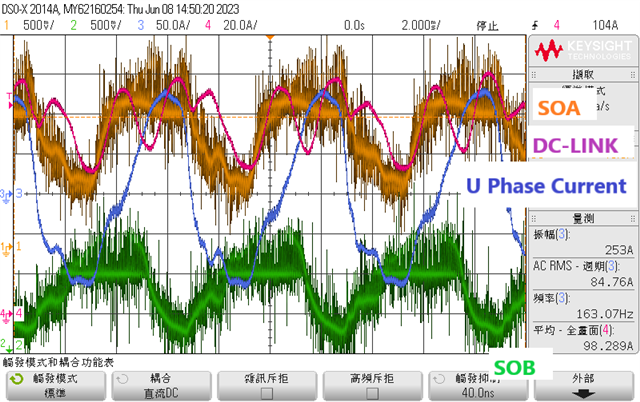
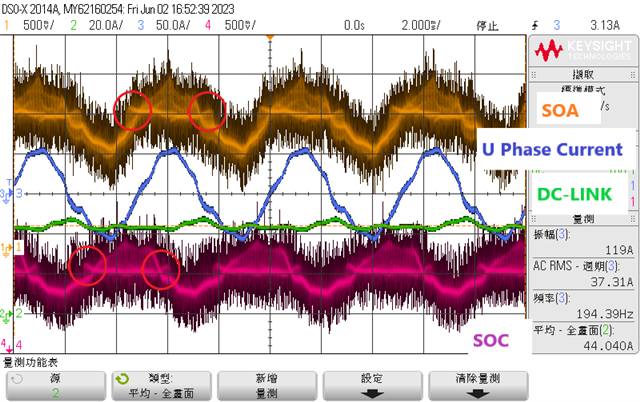
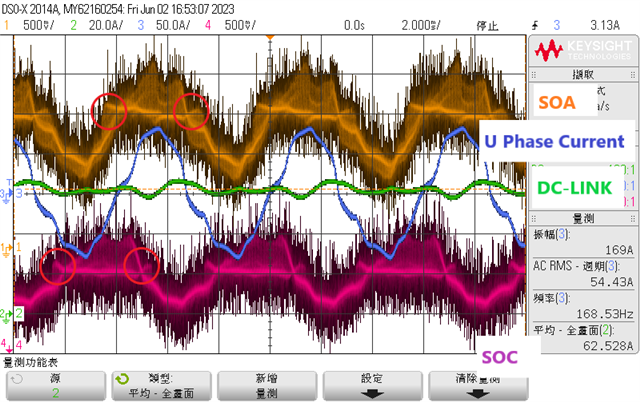
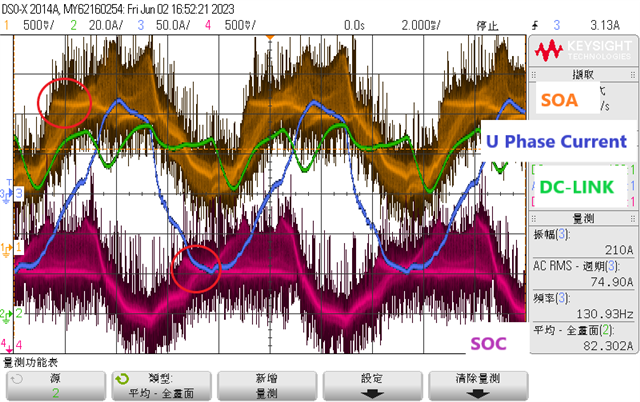
The current feedback signal SOA, SOB, SOC generated by the DRV8343S when the motor is loaded has abnormal spikes. Why is this happening?
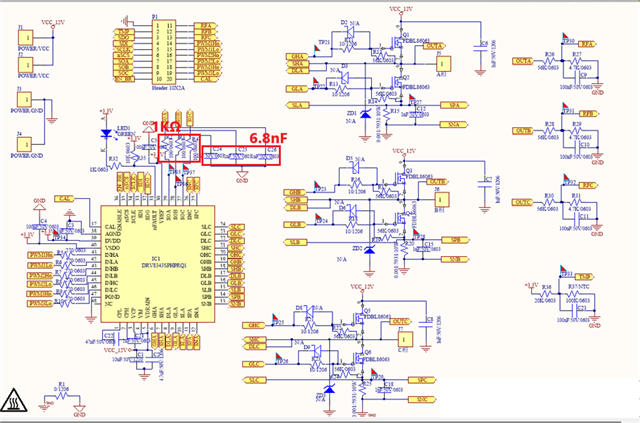
Driver board circuit is as follows:
Testing waveform is as follows:
Could you help check this case? Thanks.
Best Regards,
Cherry