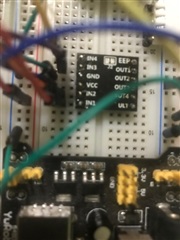
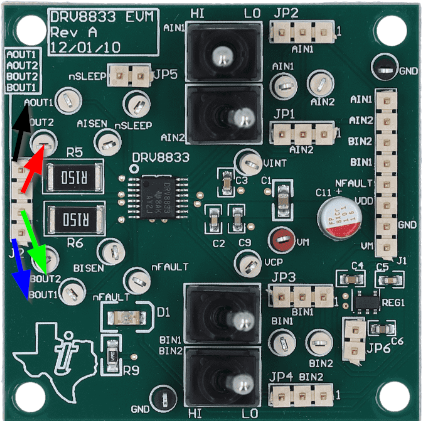
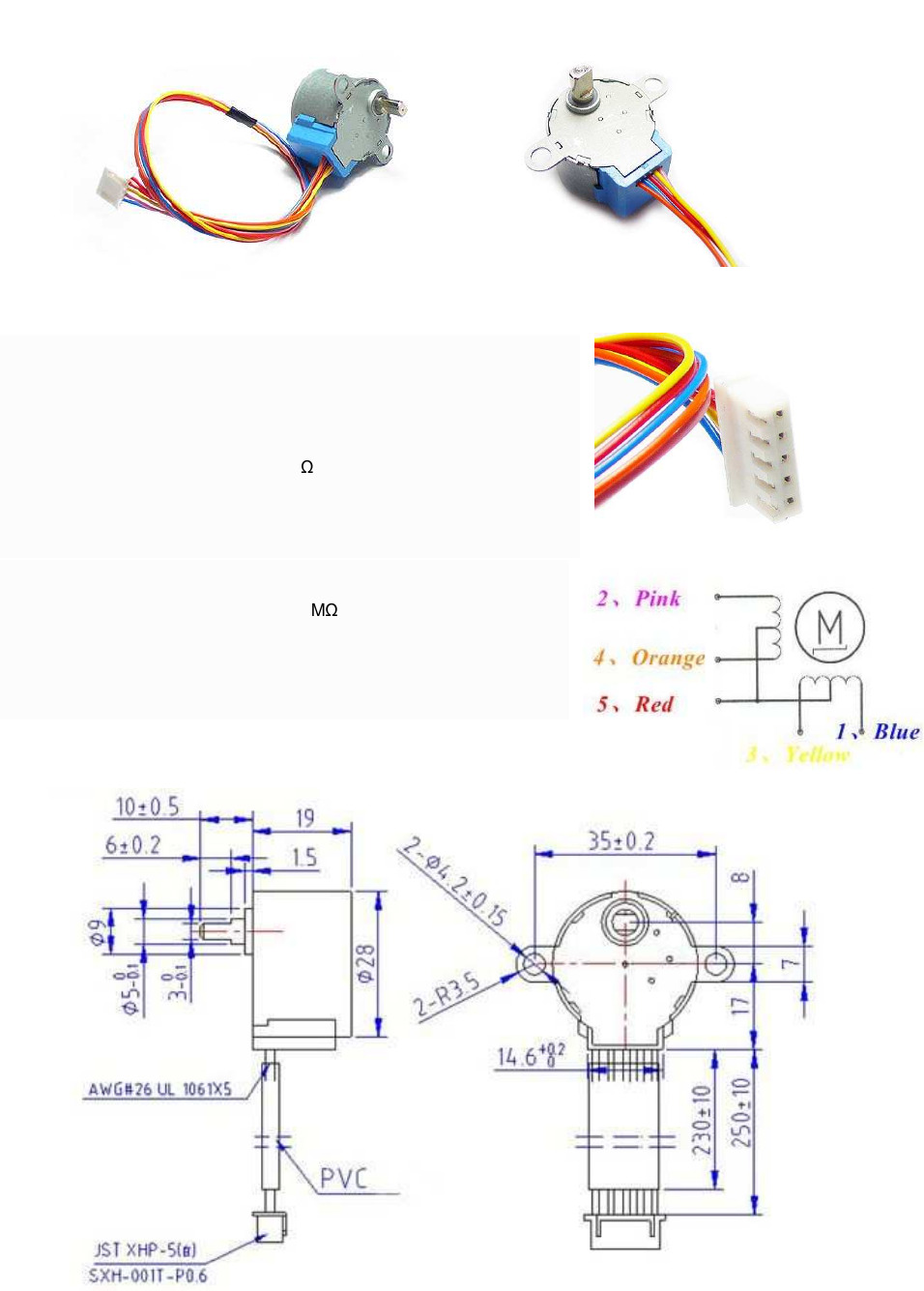
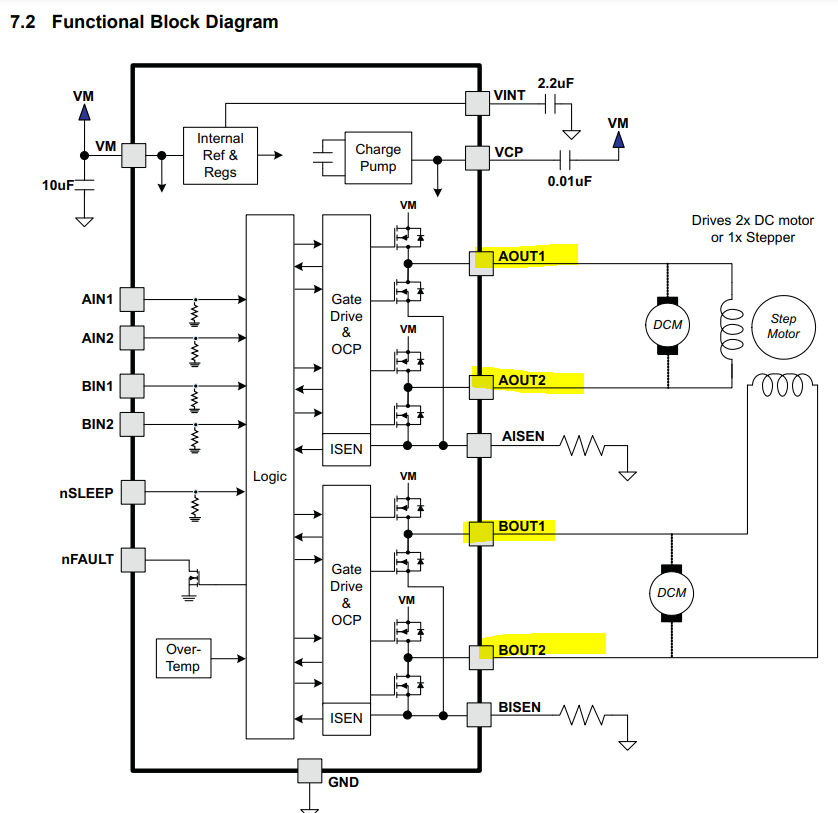
Trying to work on the project presented in Ti bulletin tiduah5 and I don't see any labels in the diagrams or photos for output pins of the DRV8833 except a problematic color coded wire with no legend. What does one do if they use another motor ? Also, I am not using the $50 eval board for the DRV8833, rather the $2 chips on a breakout board as shown below. Can someone comment on the motor to DRV8833 connections. I think there are 4 pins for outputs + 2 pins for other stuff. Also the Vexta 7 doesn't come with voltage on the badge so I'm not sure what I am supposed to supply. Thank you.