I connect my motor exactly as it explained but it gives controller_fault when I run mpet or tried tu run motor by potentiometer.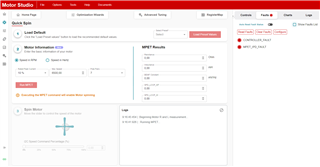

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

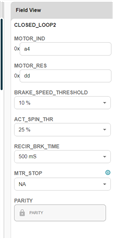
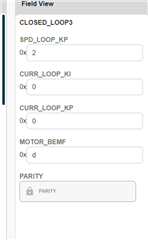
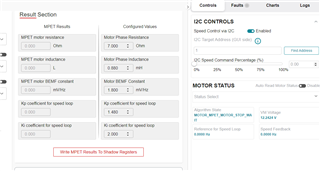
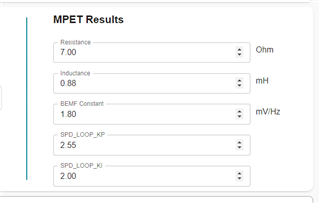 as you can see from here. I write these values from the datasheet of the motor. When I tried to control the motor from I2C controls panel, motor do not run.
as you can see from here. I write these values from the datasheet of the motor. When I tried to control the motor from I2C controls panel, motor do not run.