Other Parts Discussed in Thread: MSP430FR2355, MCF8316A
Hi Team,
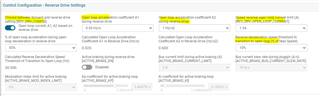
I have a fan design project, I use TI's MCF8316AVRGFR driver and MCU MSP430FR2355. So everything worked very well. However, when I set the mode change from forward rotation to reverse rotation in GUI 1.1.8 and I measured the phase current. Here is the result:
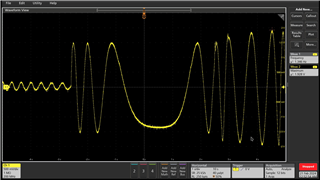
The motor is rotating forward, decreasing from high speed to low speed. When at very low speed, the motor is braked by the current on the figure and the motor rotates in reverse.
I don't understand the brake motor being used and how to generate brake current to brake the motor using MCF8316A.
Could you show me how to do it and provide some solution?
Regards,
Vuong N.T.