Other Parts Discussed in Thread: DRV8873-Q1, DRV8876-Q1, , DRV8245-Q1, DRV8145-Q1
Hi, TI,
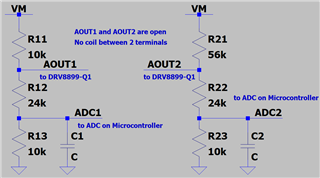
I would like to check with you about the leakage on AOUT1, AOUT2, BOUT1 and BOUT2, when driver outputs are disabled (Hi-Z state)?
and i want to know in which configuration the driver outputs can be set in real Hi-Z state?
During my testing and measurement,
1. if i only set nSleep pin in LOW, i got huge leakage (sink current, max >900uA) on these output pins;
2. if i set nSleep in HIGH and leave DRVOFF FLOATING (internal pull up to DVDD), the leakage became lower, but still in huge values (max >500uA);
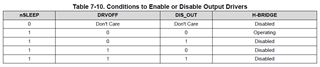
3. if i conneted DRVOFF to GND and set bit DIS_OUT=1, no improvement.
This chip is quite different from other ones, like DRV8876-Q1, DRV8873-Q1 .
The leakage on output pins of driver, is too big.
TI, can you please check my setup and share some advices i was wrong during testing. Many thanks!