Other Parts Discussed in Thread: DRV8832
Tool/software:
I have a motor drive circuit using the DRV8832QDGQRQ1 with a 0.15Ω current sense resistor (I_LIMIT=1.333A). I want to increase the current limit, but don't have the appropriate resistor on hand at the moment, so I decided to short ISENSE to ground in order to completely remove the current limit.
Per Section 7.3.5 of Rev C of the datasheet:
"If the current limit feature is not needed, the ISENSE pin may be directly connected to ground."
I added a wire jumper shorting out my existing 0.15Ω resistor. With this setup, I get a fault immediately upon enabling the motor drive. This is with the same motor load that was working fine with the 0.15Ω resistor. Why would this fault be occurring with ISENSE shorted directly to ground? Is the datasheet correct about this functionality?
I'm starting to think that we are inducing an OCP fault by tying the ISENSE pin to ground.
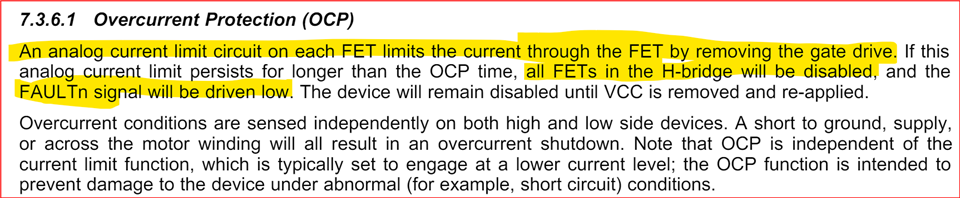
Per Section 7.3.6.1 of the datasheet:
"Overcurrent conditions are sensed independently on both high and low side devices. A short to ground, supply,
or across the motor winding will all result in an overcurrent shutdown."
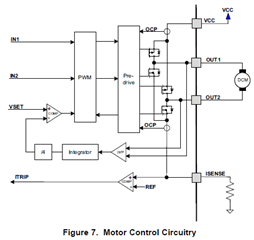
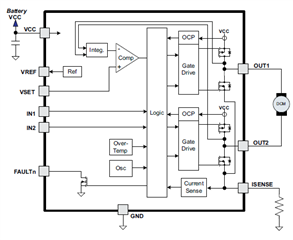
Where and how is OCP being sensed? There are two diagrams right next to each other in the datasheet that show differing accounts of the OCP sense connections. One shows the OCP sense input at the high side of each channel (effectively the same thing), the other shows one OCP sense input at the high side and one at the low side. If OCP is being sensed on the low side where shown in Figure 7, then does shorting ISENSE to GND meet the "short to ground" condition that causes an OCP fault?
Section 7.2, Functional Block Diagram
Section 7.3.1, Figure 7: