Hello team,
my customer is starting their NVM configuration for a Leo/Lea with single phase configuration.
We provided a respective TPS6594 example JSON file as template (attached)
They are doing their first steps and need support on learning to use the GUI
Kind regards
Dierk Bronner | Staff FAE Automotive
From Customer:
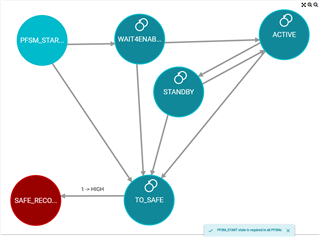
We are starting to work with the JSON template and the GUI is showing a warning message

The state machine of the JSON template looks like following

Does this impact the functionality of the PMIC ?