- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Original question:

TMDXIDK5718: SOF/SyncManager Jitter - PRU-ICSS-ETHERCAT-SLAVE for AM571x_idk
Hello,
I am reposting this inquiry as the previous ones got locked due to inactivity.
I'm encountering what appears to be some sort of jitter with the SOF/SyncManager on my Sitara EtherCAT Slave Controller. I'd like to understand if there is an easy way to perform diagnostic on the Slave Controller. Specifically we are looking for a direct way to measure the SOF signal. Our setup is as follows.
Master:
Slave
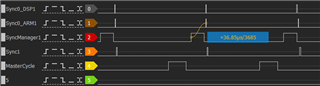
We're currently only tracing timings using a GPIO toggle in the interrupt handlers for Sync0/Sync1/SyncManager. We're currently measuring time from SyncManager to Sync0 as ~36us when the expected value is 55us resulting in about 20us jitter from SOF to SyncManaer. When Acontis has measured this timing on an EL9800 board, they do not see such a delay, although they are directly measuring the SOF signal, and not the SyncManager interrupt. Any guidance on how to measure SOF on the Sitara would be of great help.
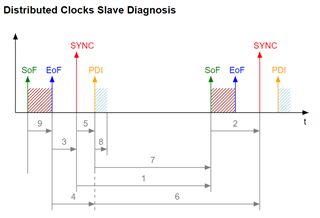
For reference I'm basing my understanding of SOF timing from this beckhoff documentation.
https://infosys.beckhoff.com/english.php?content=../content/1033/tc3_io_intro/1446579467.html&id=
Regards,
Marvin