



Please see attachment.
Did you know these performance parameters?
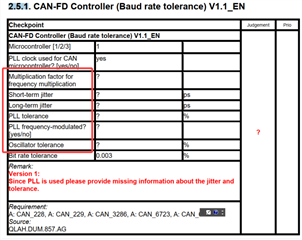
Please tell us how to fill it?
1.How much should the Short-term jitter fill?
2.How much should the Long-term jitter fill?
3.How much should the PLL tolerance fill?
4.Is the PLL frequency-modulated?
5.How much should the Oscillator tolerance fill?