Other Parts Discussed in Thread: SYSCONFIG
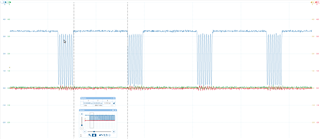
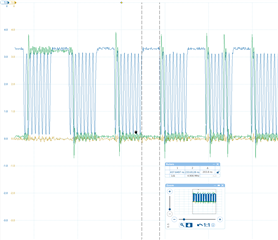
I'm currently working with the MCSPI peripheral on the AM62 SK board. I have to transfer image-like data and need appropriate bandwidth. However, my effective bandwidth is far below what I would expect. When I look at the signal using an oscilloscope I can see the cause: after each word sent the SPI controller makes a break of about 1.1 us while the actual word is sent with 0,3 us. This means that I'm effectively only using ~22% of my bandwidth. When I increase the SPI clock to 50 MHz, one word gets sent in ~0,16 us while the total "cycle time" (word + delay) still takes ~1,4 us, which reduces the effective bandwidth even to 11%.
Now I want to reduce this word delay and my question is if this delay can be configured somehow? Below I will give more details on my setup. Maybe I'm having a mistake in somewhere?
------------------- Details -------------------
I'm using the MCSPI with Cortex-A53 from Linux, so MCSPI should be controlled by the "drivers/spi/spi-omap2-mcspi.c" driver. I tested it with the kernel of TI's Linux Processor SDK (version 08.03.00.19). I configured SPI to operate in mode 3 and with 8 Bits per word. Below I provided a Sysconfig snippet to show which pin-muxing configuration I'm using. Also I attach a snippet of the devicetrees showing how I register my test module to the kernel:
/**
* These arguments were used when this file was generated. They will be automatically applied on subsequent loads
* via the GUI or CLI. Run CLI with '--help' for additional information on how to override these arguments.
* @cliArgs --device "AM62x" --package "ALW" --part "Default"
* @versions {"tool":"1.12.1+2446"}
*/
scripting.excludeFromBuild("AM62x_pinmux.h");
scripting.excludeFromBuild("AM62x_pinmux_data.c");
/**
* These are the peripherals and settings in this configuration
*/
const iSPI1 = scripting.addPeripheral("SPI");
iSPI1.$name = "IIR_SPI";
iSPI1.$assign = "SPI2";
iSPI1.CLK.$assign = "ball.A20";
iSPI1.CS0.$assign = "ball.E19";
iSPI1.CS1.$used = false;
iSPI1.CS2.$used = false;
iSPI1.CS3.$used = false;
iSPI1.D0.$assign = "ball.B19";
iSPI1.D1.$assign = "ball.A19";
&main_pmx0 {
uec_spi2_pins_default: uec-spi2-pins-default {
pinctrl-single,pins = <
AM62X_IOPAD(0x01b0, PIN_INPUT, 1) /* (A20) MCASP0_ACLKR.SPI2_CLK */
AM62X_IOPAD(0x01ac, PIN_INPUT, 1) /* (E19) MCASP0_AFSR.SPI2_CS0 */
AM62X_IOPAD(0x0194, PIN_INPUT, 1) /* (B19) MCASP0_AXR3.SPI2_D0 */
AM62X_IOPAD(0x0198, PIN_INPUT, 1) /* (A19) MCASP0_AXR2.SPI2_D1 */
>;
};
};
...
&main_spi2 {
status = "ok";
pinctrl-names = "default";
pinctrl-0 = <&uec_spi2_pins_default>;
ti,pindir-d0-out-d1-in = <1>;
spitest@0 {
compatible = "test,device";
reg = <0>;
spi-max-frequency = <50000000>;
};
};
The SPI core API of Linux foresees some functions to control the inter-word delay and other timing parameters (which doesn't mean that all drivers are implementing it). I tested all of them, but the actual signal kept unchanged. Below I've attached a simple kernel module that can be used to reproduce the issue. The module can be built with the kernel contained in Processor SDK.
#include <linux/errno.h>
#include <linux/module.h>
#include <linux/printk.h>
#include <linux/spi/spi.h>
struct spitest_data
{
struct spi_device *spi;
u32 len;
};
int spitest_read_sync(struct spitest_data *spitest)
{
int status;
u8 *rx_buf;
u8 *tx_buf;
u32 len_aligned;
struct spi_transfer *xfers;
struct spi_message msg;
struct spi_device *spi = spitest->spi;
rx_buf = kzalloc(spitest->len, GFP_KERNEL);
tx_buf = kzalloc(spitest->len, GFP_KERNEL);
xfers = kcalloc(1, sizeof(struct spi_transfer), GFP_KERNEL);
if (xfers == NULL)
return -ENOMEM;
xfers[0].rx_buf = rx_buf;
xfers[0].tx_buf = tx_buf;
xfers[0].len = spitest->len;
xfers[0].speed_hz = spi->max_speed_hz;
xfers[0].bits_per_word = spi->bits_per_word; // == 8 bpw
xfers[0].word_delay = spi->word_delay; // == 0
xfers[0].cs_change_delay = spi->word_delay; // == 0
xfers[0].delay = spi->word_delay; // == 0
spi_message_init(&msg);
spi_message_add_tail(&xfers[0], &msg);
status = spi_sync(spi, &msg);
kfree(rx_buf);
kfree(tx_buf);
kfree(xfers);
return status;
}
/*----------------------------------------------------------------------------*/
static int spitest_probe(struct spi_device *spi)
{
int status;
struct spitest_data *spitest;
spitest = kzalloc(sizeof(*spitest), GFP_KERNEL);
if (!spitest) return -ENOMEM;
spitest->spi = spi;
spitest->len = 4096; // arbitrarily chosen
spitest->spi->max_speed_hz = 25000000;
spitest->spi->chip_select = 0;
spitest->spi->bits_per_word = 8;
spitest->spi->mode = SPI_MODE_3;
spitest->spi->word_delay.unit = SPI_DELAY_UNIT_USECS;
spitest->spi->word_delay.value = 0;
// setting all delays to see if something changes
spitest->spi->cs_setup.unit = SPI_DELAY_UNIT_USECS;
spitest->spi->cs_setup.value = 0;
spitest->spi->cs_hold.unit = SPI_DELAY_UNIT_USECS;
spitest->spi->cs_hold.value = 0;
spitest->spi->cs_inactive.unit = SPI_DELAY_UNIT_USECS;
spitest->spi->cs_inactive.value = 0;
status = spi_setup(spitest->spi);
spi_set_drvdata(spi, spitest);
// make test transaction
status = spitest_read_sync(spitest);
return status;
}
static void spitest_remove(struct spi_device *spi)
{
struct spitest_data *spitest;
spitest = spi_get_drvdata(spi);
kfree(spitest);
}
/*----------------------------------------------------------------------------*/
static const struct spi_device_id spitest_spi_ids[] = {
{ .name = "device" },
{},
};
MODULE_DEVICE_TABLE(spi, spitest_spi_ids);
static const struct of_device_id spitest_dt_ids[] = {
{ .compatible = "test,dvice" },
{}
};
static struct spi_driver spitest_spi_driver = {
.driver = {
.name = "spitest",
.of_match_table = spitest_dt_ids
},
.id_table = spitest_spi_ids,
.probe = spitest_probe,
.remove = spitest_remove
};
module_spi_driver(spitest_spi_driver); // macro replacing module init/exit
MODULE_LICENSE("GPL");
Thanks in advance,
Claudio