Part Number: AM62A7
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
SDK version: 9.2
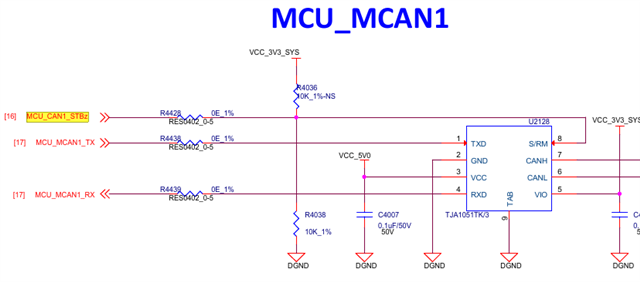
When we use MCU CAN0, MCU CAN1, and SOC CAN0 in AM62A7, we find that only MCU CAN0 can correctly send and receive FD frame with bit rate switching. When the MCU CAN1 is configured with the same configuration as MCU CAN0, MCU CAN1 cannot correctly send FD frame with bit rate switching (standard messages can be sent and received normally).
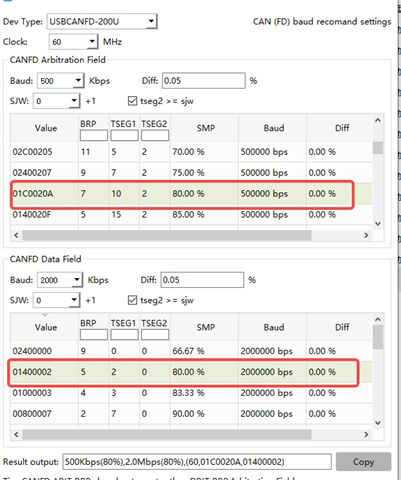
Use ZLG's USBCANFD-200U as a upping debugging device, and set the communication parameters as follows:
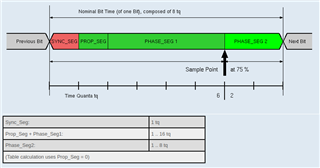
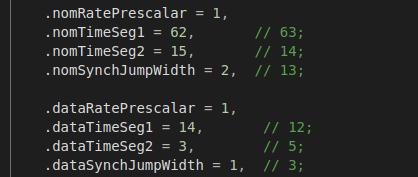
Protocol standard: CAN FD ISO, FD frame with bit rate switching function is enable. Arbitration baud rate: 500Kbps, data filed baud rate 2Mbps, and the sample point is 80%.
using this configuration, MCU CAN0 FD frame with bit rate switching can be sent and received normally.
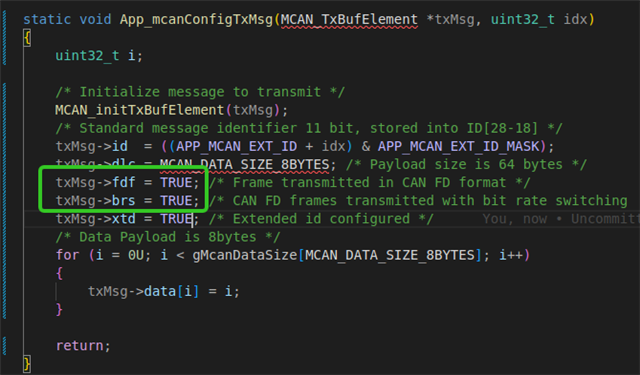
Modify MCU CAN1 communication configuration parameters to be consistent with MCU CAN0. It is found that only standard messages can be sent and received normally, but CAN FD frame with bit rate switching sent by the debugging device can be accepted. When MCU CAN1 try send CAN FD frame with bit rate switching, the interrupt
MCAN_INTR_SRC_PROTOCOL_ERR_DATA is triggered. FD CAN FD frame with bit rate switching sent failed.
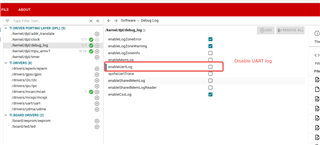
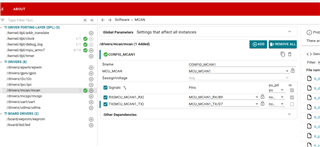
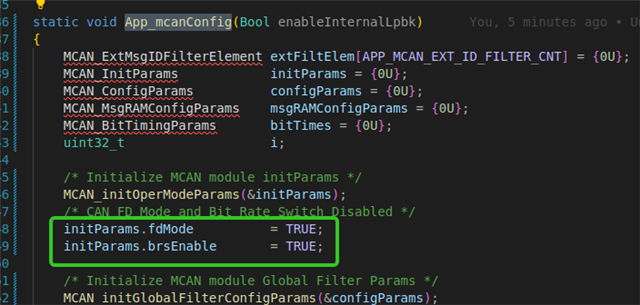
Initialized configuration parameters:
Please give me helps.
Thank you.








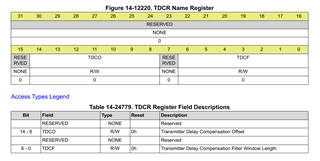
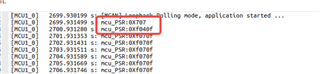 the 1st dump the TDC is 0,the 2nd dump the DLEC is 4, that is data BIT1 error, and the TDC has changed to 0xF. in the default init code. the TDC is setup to 0.
the 1st dump the TDC is 0,the 2nd dump the DLEC is 4, that is data BIT1 error, and the TDC has changed to 0xF. in the default init code. the TDC is setup to 0.