Part Number: SK-AM62A-LP
Tool/software:
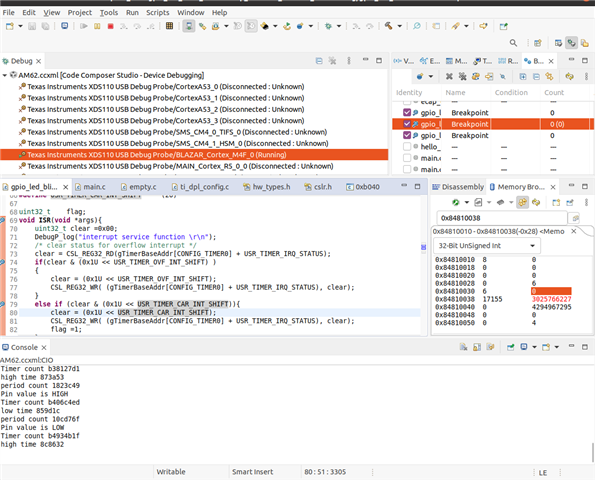
Not Able to Generate Capture Interrupt using MCU_Timer_IO1, although all the timer configuring registers are updated accordingly as you can see ..
But interrupt is not being generated even though pulse that is being passed is correctly reflecting (checked via gpio read), Also overflow interrupt is generating according to overflow but capture isn't.