Tool/software:
Hi,TI experts
1. The RTOS SDK version is 9.0. The software is compiled and debugged on MCUSW, and the running kernel is mcu1_0.
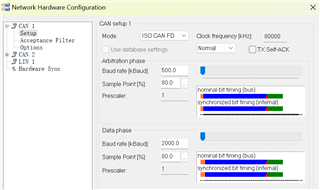
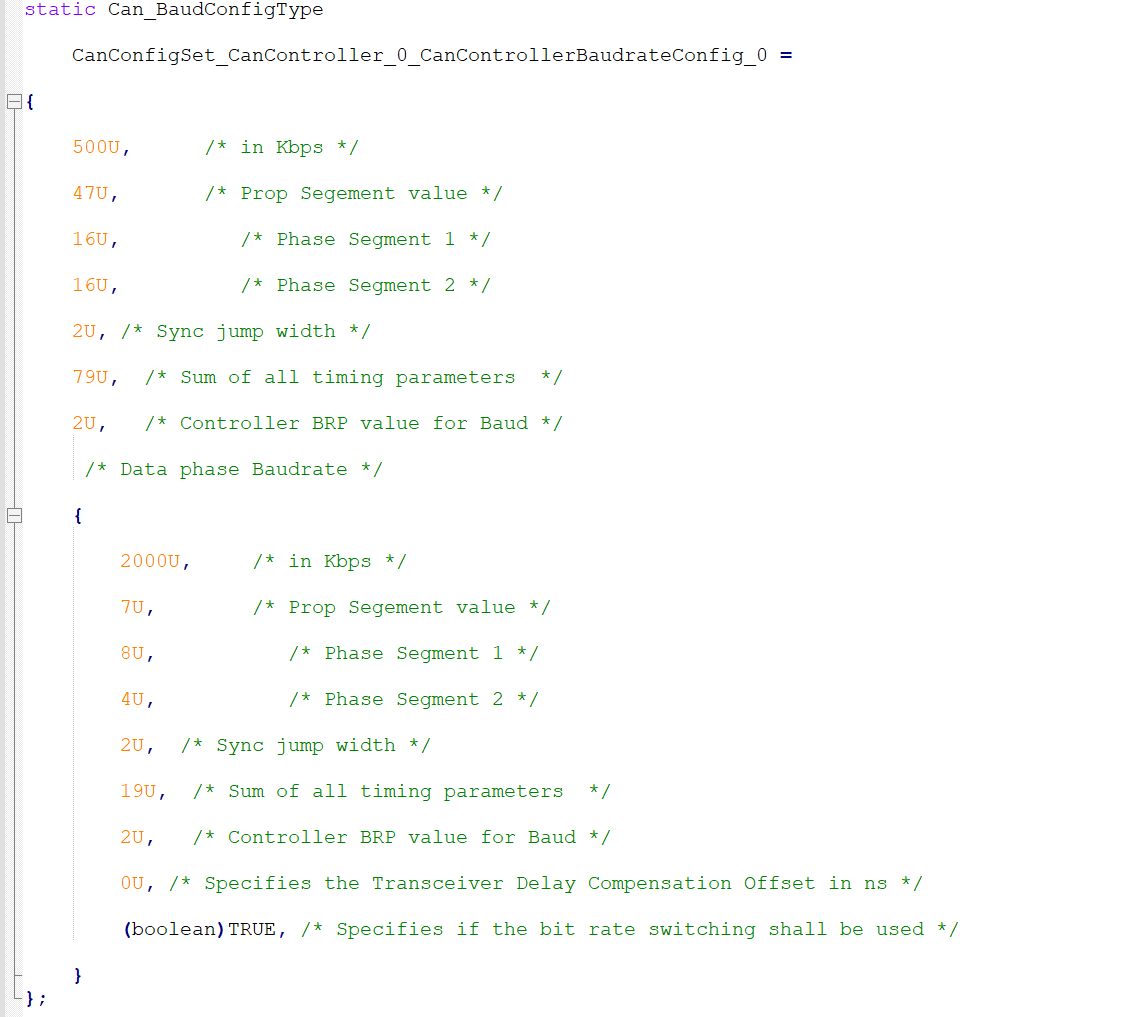
2. See the figure below for CAN FD parameter settings.
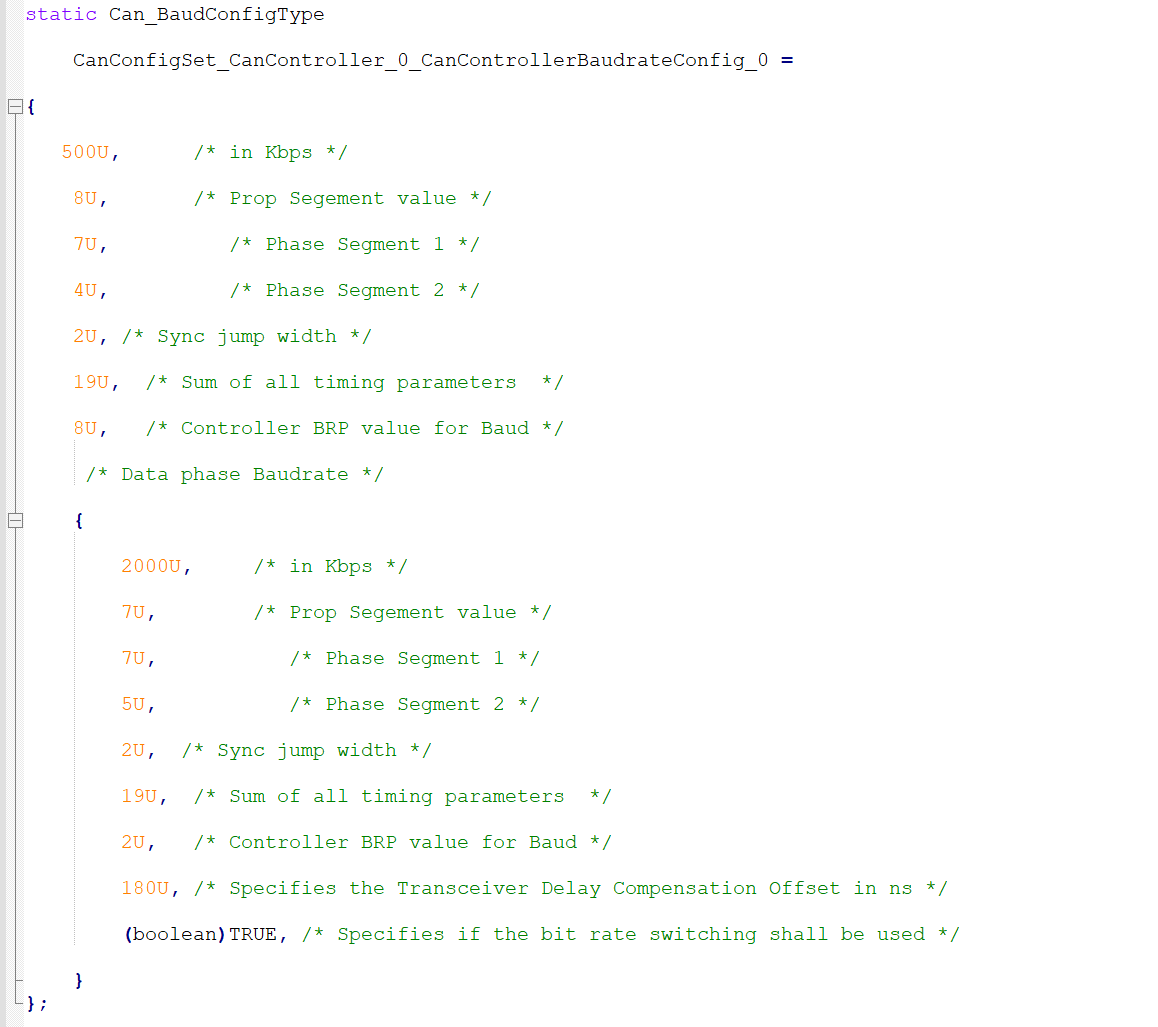
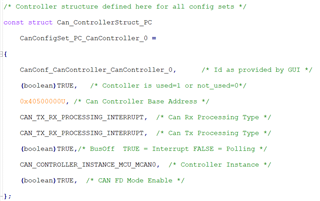
See the attachment for the specific code.
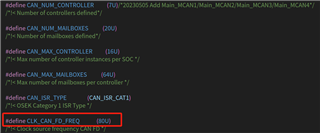
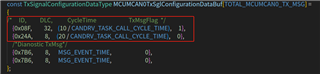
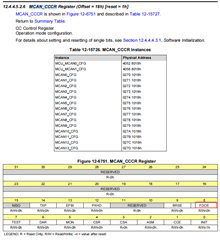
3. The following figure shows the CAN sending function `void MCUMCAN0TxMsg(void)` and printing the MCAN_CCCR Register value.
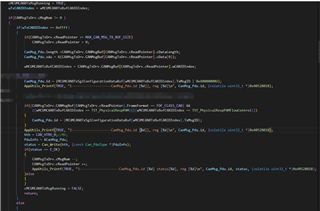
On the serial port, the MCAN_CCCR Register's bit8 FDOE value remains 0.
4.In summary, through external CAOE observation, CAN's sending and receiving are running at the arbitration field's 500k baud rate, while the data field's 2M baud rate is not running.
That is all, please TI experts help answer, thank you!