Tool/software:
Dear Ti,
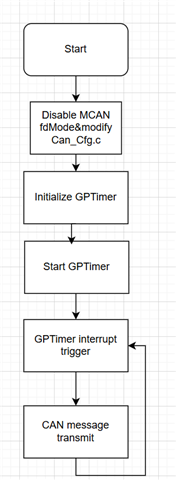
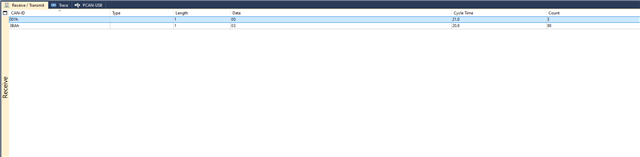
I am using Gptimer to control CAN transmission. I just want to send messages (Classical CAN) every 20 ms infinitely, so I copy sample code of Gpt directory to initialize. The patch is the files I have modified.
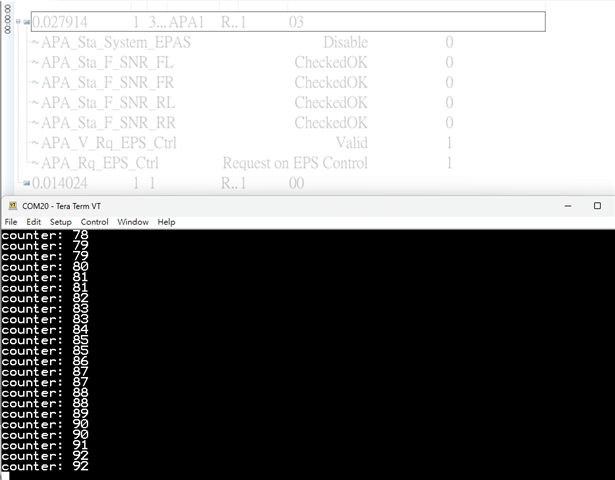
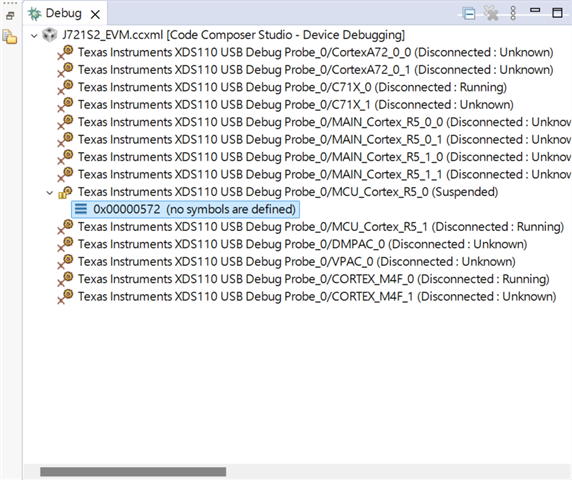
However, I don't know why the transmission always stopped after send 89 times and then it will send 3 times of 001 ID trace (CAN sent messages), after that the process just like stopped. When I click stop on ccs, it only showed like the screenshot, I don't know what it means, how can I know where in the code the program is running?
ps. all modified under directory of "ti_J721S\ti-processor-sdk-rtos-j721s2-evm-10_01_00_04", CAN_LOOPBACK_ENABLE in Can_Cfg.h set to STD_OFF
patch:
diff --git a/mcusw/build/Rules.make b/mcusw/build/Rules.make
index 5714bd26..eb70dd1d 100644
--- a/mcusw/build/Rules.make
+++ b/mcusw/build/Rules.make
@@ -130,7 +130,7 @@ endif
export device_family
# Default Build Profile
# Supported Values: debug | release
-export BUILD_PROFILE ?= release
+export BUILD_PROFILE ?= debug
# Default Build Variant
# Supported Values: precompile | linktime | postbuild
diff --git a/mcusw/mcal_drv/mcal/Can/src/Can.c b/mcusw/mcal_drv/mcal/Can/src/Can.c
index 662163a2..b512d08e 100755
--- a/mcusw/mcal_drv/mcal/Can/src/Can.c
+++ b/mcusw/mcal_drv/mcal/Can/src/Can.c
@@ -427,6 +427,10 @@ FUNC(Std_ReturnType, CAN_CODE) Can_Write(
Can_DriverObj.canController[MsgCntrlr].canTxStatus[msgObjIndx]
= 1U;
}
+ else
+ {
+ status = E_NOT_OK;
+ }
}
/* CAN_CoverageGap_31: Dynamic coverage for the below 'else' statement is not
* covered.The 'else' statement is added as an additional safety
diff --git a/mcusw/mcal_drv/mcal/Can/src/Can_Mcan.c b/mcusw/mcal_drv/mcal/Can/src/Can_Mcan.c
index d4f48472..cedb1f00 100644
--- a/mcusw/mcal_drv/mcal/Can/src/Can_Mcan.c
+++ b/mcusw/mcal_drv/mcal/Can/src/Can_Mcan.c
@@ -1806,7 +1806,7 @@ static void Can_mcanInit(MCAN_InitParams *initParams,
baseAddr = canControllerCfg_PC->CntrAddr;
/* Initialize MCAN Init params */
- initParams->fdMode = (uint32)MCAN_CCCR_FDOE_ENABLE;
+ initParams->fdMode = (uint32)MCAN_CCCR_FDOE_DISABLE;
if((boolean)TRUE ==
canControllerCfg->DefaultBaud->BaudFdRateConfig.BrsSwitch)
{
diff --git a/mcusw/mcal_drv/mcal/examples/Can/CanApp.c b/mcusw/mcal_drv/mcal/examples/Can/CanApp.c
index f23bfc42..d93028d0 100644
--- a/mcusw/mcal_drv/mcal/examples/Can/CanApp.c
+++ b/mcusw/mcal_drv/mcal/examples/Can/CanApp.c
@@ -83,14 +83,21 @@ static void CanApp_LoopbackTest(void);
#if (STD_ON == CAN_SAFETY_DIAGNOSTIC)
static void CanApp_SafetyApiTest(void);
#endif
+static void AppUtils_delay(uint32 count);
/* ========================================================================== */
/* Global Variables */
/* ========================================================================== */
uint32 CanApp_TestPassed = E_OK;
+uint8 hth = 0U;
+Std_ReturnType status = E_OK;
+uint32 GptApp_DemoStatus = E_OK;
+
/**< Variable used for Demo status */
Can_PduType CanApp_Pdu, CanApp_Pdu1;
Can_PduType CanApp_Pdu2, CanApp_Pdu3, CanApp_Pdu4, CanApp_Pdu5;
+volatile uint32 GptApp_NotifiedForInstFlag = 0xFFFF;
+extern volatile uint8 GptApp_WakeupSrcDetFlag;
/**< Variables which contains Can PDU data used in Can transmission */
uint8 CanApp_InputData[64U] =
@@ -102,6 +109,45 @@ uint8 CanApp_InputData[64U] =
0xA6, 0x6A, 0xFF, 0xFF, 0xC6, 0x6C, 0xB6, 0x6B,
0xA7, 0x7A, 0xFF, 0xFF, 0xC7, 0x7C, 0xB7, 0x7B,
0xA8, 0x8A, 0xFF, 0xFF, 0xC8, 0x8C, 0xB8, 0x8B};
+
+uint8 txData[8U];
+
+uint8 BCAN_TX_0x3BA_APA1_GetRC(void) {
+ static uint8 cnt = 0;
+ return (cnt++) & 0x0F;
+}
+
+uint8 BCAN_TX_0x3BA_APA1_GetCS(uint8 *data, uint8 roll_count) {
+ uint8 checksum = 0;
+ for (int i = 0; i < 8; i++) {
+ checksum += data[i];
+ }
+ return checksum & 0x0F;
+}
+
+void BCAN_TX_0x3BA_APA1(uint8 *data) {
+ TU_APA1_MSG *obj = (TU_APA1_MSG *)data;
+
+ obj->Bits.APA_V_Rq_EPS_Ctrl = bcanData.TX.Angle.Valid;
+ obj->Bits.APA_Rq_EPS_Ctrl = bcanData.TX.Angle.Apply;
+ obj->Bits.APA_Angle_Target_0 = (uint8)(bcanData.TX.Angle.Value >> 8);
+ obj->Bits.APA_Angle_Target_1 = (uint8)(bcanData.TX.Angle.Value & 0xFF);
+ obj->Bits.APA_Roll_Count = BCAN_TX_0x3BA_APA1_GetRC();
+ obj->Bits.APA_checksum = BCAN_TX_0x3BA_APA1_GetCS(data, obj->Bits.APA_Roll_Count);
+}
+
+#if defined (SOC_J721E) || (SOC_J7200) || defined (SOC_J721S2) || defined (SOC_J784S4) || defined (SOC_J742S2)
+FUNC(void, GPT_CODE_FAST) GptApp_GptXIsr(uintptr_t GptPtr)
+{
+ GptApp_IsrType gptChIsr = (GptApp_IsrType)GptPtr;
+
+ /* Associated GPT ISR */
+ gptChIsr();
+}
+#endif
+const Gpt_ConfigType *pCfgPtr = &GptChannelConfigSet;
+extern const struct Gpt_ChannelConfigType_PC_s Gpt_ChannelConfig_PC[GPT_MAX_CHANNELS];
+
/**< Variable which contains Can SDU data that is transported inside the PDU */
const Can_PduType *PduInfo;
/**< Variable which contains Can PDU data passed during Transmission */
@@ -120,6 +166,7 @@ extern volatile P2CONST(PduInfoType, CANIF_VAR_CLEARED, CANIF_APPL_DATA)
/* ========================================================================== */
sint32 main(void)
{
+ Gpt_Init(pCfgPtr);
CanApp_TestPassed = E_OK;
#if defined (SOC_AM62X) || defined (SOC_AM62AX) || defined (SOC_AM62DX) || defined (SOC_AM62PX) || defined (SOC_J722S)
@@ -143,9 +190,9 @@ sint32 main(void)
CanApp_PlatformInit();
CanApp_LoopbackTest();
-#if (STD_ON == CAN_SAFETY_DIAGNOSTIC)
- CanApp_SafetyApiTest();
-#endif
+// #if (STD_ON == CAN_SAFETY_DIAGNOSTIC)
+// CanApp_SafetyApiTest();
+// #endif
AppUtils_Printf(MSG_NORMAL,
"CAN Stack Usage: %d bytes\n", AppUtils_GetStackUsage());
@@ -170,175 +217,121 @@ sint32 main(void)
return (CanApp_TestPassed);
}
-static void CanApp_LoopbackTest(void)
+void AppUtils_delay (uint32 count)
{
- uint32 ctlr_cnt, mask = 0x00000000U, canMaxControllerCnt;
- uint8 loopCnt = 0U, hth = 0U;
- Std_ReturnType status;
- const Can_ConfigType *Can_ConfigPtr;
-
-#if (STD_ON == CAN_VARIANT_PRE_COMPILE)
- Can_ConfigPtr = &CAN_INIT_CONFIG_PC;
-#else
- Can_ConfigPtr = &CanConfigSet;
-#endif
+ volatile uint32 x = count;
+ while (x)
+ x--;
+}
- canMaxControllerCnt = Can_ConfigPtr->CanMaxControllerCount;
- for (ctlr_cnt = 0U; ctlr_cnt < canMaxControllerCnt;
- ctlr_cnt++)
+void Gpt_Channel_Notify12(void)
+{
+ // AppUtils_Printf(MSG_NORMAL, "Can_Gpt: GPT Notification received for channel 11 !!!\n");
+ status = Can_Write(hth, PduInfo);
+ if (status != E_OK)
{
- /* Set Can frame */
- CanApp_SetupCanFrame(ctlr_cnt, &hth, &mask);
-
- /* Set Controller Mode to Start */
- status = Can_SetControllerMode(
- CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId, CAN_CS_STARTED);
- if (status != E_OK)
- {
- CanApp_TestPassed = E_NOT_OK;
- }
-
-#if (CAN_LOOPBACK_ENABLE == STD_ON)
- /* Enable loopback mode in CAN */
- Can_TestLoopBackModeEnable(
- CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId, 0U);
-#endif
-
- /* Do Can Write to send the CanApp_InputData on CAN bus */
- status = Can_Write(hth, PduInfo);
-
-#if defined (SOC_AM62X) || defined (SOC_AM62AX) || defined (SOC_AM62DX) || defined (SOC_AM62PX) || defined (SOC_J722S)
- Can_MainFunction_Write();
- for(int cnt=0; cnt<100000;cnt++)
- {
- ;
- }
-#endif
+ AppUtils_Printf(MSG_NORMAL,
+ "CAN_APP: Error In Can_Write.\n");
+ CanApp_TestPassed = E_NOT_OK;
+ }
+ else
+ {
+ BCAN_TX_0x3BA_APA1(txData);
+ }
+ GptApp_NotifiedForInstFlag = 11U; /* Set it to channel number */
+}
- if (status != E_OK)
- {
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Error In Can_Write.\n");
- CanApp_TestPassed = E_NOT_OK;
- }
+void Gpt_Channel_Notify7(void)
+{
+ // AppUtils_Printf(MSG_NORMAL, "Can_Gpt: GPT Notification received for channel 6 !!!\n");
+ status = Can_Write(hth, PduInfo);
+ if (status != E_OK)
+ {
+ AppUtils_Printf(MSG_NORMAL,
+ "CAN_APP: Error In Can_Write.\n");
+ CanApp_TestPassed = E_NOT_OK;
+ }
+ else
+ {
+ BCAN_TX_0x3BA_APA1(txData);
+ }
+ GptApp_NotifiedForInstFlag = 6U; /* Set it to channel number */
+}
- while ((CanIf_TxConfirmationCount != 1U))
- {
- /* Wait for Tx Confirmation */
-#if defined (SOC_AM62X) || defined (SOC_AM62AX) || defined (SOC_AM62DX) || defined (SOC_AM62PX) || defined (SOC_J722S)
- Can_MainFunction_Write();
- for(int cnt=0; cnt<10000;cnt++)
- {
- ;
- }
-#endif
+void Gpt_Channel_Notify10(void)
+{
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: GPT Notification received for channel 9 !!!\n");
+ GptApp_NotifiedForInstFlag = 9U; /* Set it to channel number */
+}
- }
+void Gpt_Channel_Notify16(void)
+{
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: GPT Notification received for channel 15 !!!\n");
+ GptApp_NotifiedForInstFlag = 15U; /* Set it to channel number */
+}
-#if defined (SOC_AM62X) || defined (SOC_AM62AX) || defined (SOC_AM62DX) || defined (SOC_AM62PX) || defined (SOC_J722S)
- Can_MainFunction_Read();
+#if defined (SOC_J7200) || defined (SOC_J721S2) || defined (SOC_J784S4) || defined (SOC_J742S2)
+void Gpt_Channel_Notify18(void)
+{
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: GPT Notification received for channel 18 !!!\n");
+ GptApp_NotifiedForInstFlag = 17U; /* Set it to channel number */
+}
#endif
- if (E_OK == CanApp_TestPassed)
- {
- if ((1U == CanIf_TxConfirmationCount) &&
- (1U == CanIf_RxConfirmationCount))
- {
- CanIf_TxConfirmationCount = 0U;
- CanIf_RxConfirmationCount = 0U;
- }
- else
- {
- CanApp_TestPassed = E_NOT_OK;
- break;
- }
-
- /* Set Controller Mode to Stop*/
- status = Can_SetControllerMode(
- CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId,
- CAN_CS_STOPPED);
- if (status != E_OK)
- {
- CanApp_TestPassed = E_NOT_OK;
- }
+static void CanApp_LoopbackTest(void)
+{
+ uint32 mask = 0x00000000U, countVal;
+ Gpt_ChannelType chId;
+
+ bcanData.TX.Angle.Valid = 1;
+ bcanData.TX.Angle.Apply = 1;
+ bcanData.TX.Angle.Value = 0x2328;
+
+ /* Take each channel configuration in configuration set */
+ chId = Gpt_ChannelConfig_PC[1].channelId;
+ /* Set Can frame */
+ CanApp_SetupCanFrame(0, &hth, &mask);
+
+ /* Set Controller Mode to Start */
+ status = Can_SetControllerMode(
+ CanConfigSet_CanController_List_PC[0]->ControllerId, CAN_CS_STARTED);
+ if (status != E_OK)
+ {
+ CanApp_TestPassed = E_NOT_OK;
+ }
#if (CAN_LOOPBACK_ENABLE == STD_ON)
- Can_TestLoopBackModeDisable(
- CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId, 0U);
+ /* Enable loopback mode in CAN */
+ Can_TestLoopBackModeEnable(
+ CanConfigSet_CanController_List_PC[0]->ControllerId, 0U);
#endif
- if ((PduInfo->length == CanIf_PduInfoPtr->SduLength) &&
- (PduInfo->id == (CanIf_Mailbox->CanId | mask)))
- {
-#if defined (SOC_AM62X) || defined (SOC_AM62AX) || defined (SOC_AM62DX) || defined (SOC_AM62PX) || defined (SOC_J722S)
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Message Id Received %x Message Length is %u\t \n",
- CanIf_Mailbox->CanId, CanIf_PduInfoPtr->SduLength);
- for (loopCnt = 0U; loopCnt < CanIf_PduInfoPtr->SduLength;
- loopCnt++)
- {
- if (CanIf_PduInfoPtr->SduDataPtr[loopCnt] !=
- CanApp_InputData[loopCnt])
- {
- CanApp_TestPassed = E_NOT_OK;
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Transmitted and Received Data miss-match.\n");
- break;
- }
- else
- {
- CanApp_TestPassed = E_OK;
- }
- }
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Can Controller Instance MCAN %u \
-Internal LoopBack Mode Test Passed\n", ctlr_cnt);
- }
- else
- {
- CanApp_TestPassed = E_NOT_OK;
- break;
- }
-
-#if (CAN_LOOPBACK_ENABLE == STD_ON)
- Can_TestLoopBackModeDisable(
- CanConfigSet_CanController_List_PC[ctlr_cnt]->ControllerId, 0U);
-#endif
- if ((PduInfo->length == CanIf_PduInfoPtr->SduLength) &&
- (PduInfo->id == (CanIf_Mailbox->CanId | mask)))
- {
-#endif /* if defined SOC_AM62X) */
+ #if (STD_ON == GPT_ENABLE_DISABLE_NOTIFICATION_API)
+ Gpt_EnableNotification(chId);
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: Enabled notification for channel [%d]\n", chId);
+ #endif
+ #if defined (SOC_J721E) || defined (SOC_J7200) || defined (SOC_J721S2) || defined (SOC_J784S4) || defined (SOC_J742S2)
+ countVal = GPTIMER_COUNT_VALUE_6_SEC_INPUT;
+ #endif
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: Started Timer Channel [%d]\n", chId);
+ Gpt_StartTimer(chId, countVal);
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Message Id Received %x Message Length is %u\t \n",
- CanIf_Mailbox->CanId, CanIf_PduInfoPtr->SduLength);
- for (loopCnt = 0U; loopCnt < CanIf_PduInfoPtr->SduLength;
- loopCnt++)
- {
- if (CanIf_PduInfoPtr->SduDataPtr[loopCnt] !=
- CanApp_InputData[loopCnt])
- {
- CanApp_TestPassed = E_NOT_OK;
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Transmitted and Received Data miss-match.\n");
- break;
- }
- else
- {
- CanApp_TestPassed = E_OK;
- }
- }
- AppUtils_Printf(MSG_NORMAL,
- "CAN_APP: Can Controller Instance MCAN %u \
- Internal LoopBack Mode Test Passed\n", ctlr_cnt);
- }
- else
- {
- CanApp_TestPassed = E_NOT_OK;
- break;
- }
- }
+ while(1)
+ {
+ // if (chId == GptApp_NotifiedForInstFlag)
+ // {
+ // GptApp_NotifiedForInstFlag = 0xFFFF;
+ // BCAN_TX_0x3BA_APA1(txData);
+
+ // status = Can_Write(hth, PduInfo);
+ // if (status != E_OK)
+ // {
+ // AppUtils_Printf(MSG_NORMAL,
+ // "CAN_APP: Error In Can_Write.\n");
+ // CanApp_TestPassed = E_NOT_OK;
+ // }
+ // }
}
}
diff --git a/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.c b/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.c
index 76b55920..8b3c2f98 100755
--- a/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.c
+++ b/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.c
@@ -80,11 +80,23 @@ uint32 CanApp_InstanceSrcId[CAN_MAX_CONTROLLER];
CanApp_IsrType CanApp_Isr[CAN_MAX_CONTROLLER];
/**< Associated ISR */
uint32 CanApp_RoutIntNumbers[CAN_MAX_CONTROLLER];
+uint32 GptAppStartup_EnaTimer[APP_GPT_TOTAL_TIMER_COUNT];
+uint32 GptAppStartup_IntNumbers[APP_GPT_TOTAL_TIMER_COUNT];
+uint32 GptAppStartup_TimerSrcId[APP_GPT_TOTAL_TIMER_COUNT];
+uint32 GptAppStartup_RoutIntNumbers[APP_GPT_TOTAL_TIMER_COUNT];
+GptApp_IsrType GptAppStartup_Isr[APP_GPT_TOTAL_TIMER_COUNT];
+static void GptAppStartup_ClearAnyOperationalTimers(void);
+static void GptAppStartup_SetClockSource4Timers(void);
+static void GptAppStartup_InterruptConfig(void);
+
/**< Store the output interrupt number routed */
extern Can_PduType CanApp_Pdu, CanApp_Pdu1;
extern Can_PduType CanApp_Pdu2, CanApp_Pdu3, CanApp_Pdu4, CanApp_Pdu5;
/**< Variable used for copying protocol data unit */
extern uint8 CanApp_InputData[64U];
+extern uint8 txData[8U];
+extern const struct Gpt_ChannelConfigType_PC_s Gpt_ChannelConfig_PC[GPT_MAX_CHANNELS];
+
/**< Variables which contains Can PDU data used in Can transmission */
extern const Can_PduType *PduInfo;
/**< Variable which contains Can PDU data passed during Transmission */
@@ -99,6 +111,10 @@ void CanApp_Startup(void)
Intc_Init(); /* Interrupt handler initialized, here as other functions
* can use API's to clear pending interrupts if any
*/
+ GptAppStartup_ClearAnyOperationalTimers(); /* Clear MCU TIMER 0 only */
+ GptAppStartup_SetClockSource4Timers();
+ GptAppStartup_InterruptConfig();
+
CanApp_InterruptConfig();
/* Initialize counters, that would be required for timed operations */
@@ -109,10 +125,10 @@ void CanApp_Startup(void)
/* Message for CAN-FD(MCU MCAN0 module) */
/* Setting Up CAN FD Frame*/
- CanApp_Pdu.id = 0xA0 | 0x40000000U;
- CanApp_Pdu.length = 64U;
+ CanApp_Pdu.id = 0x3BA | 0x40000000U;
+ CanApp_Pdu.length = 8U;
CanApp_Pdu.swPduHandle = 1U;
- CanApp_Pdu.sdu = &CanApp_InputData[0U];
+ CanApp_Pdu.sdu = &txData[0U];
/* Message for CAN-FD(MCU MCAN1 module) */
/* Setting Up CAN FD Extended Frame*/
@@ -132,11 +148,14 @@ void CanApp_Startup(void)
void CanApp_BuildIntList(void)
{
- uint32 idx, flag, intNum;
+ uint32 idx, flag, intNum, timerDevId;
const Can_ConfigType *Can_ConfigPtr;
CanApp_IsrType pIsrHandler = NULL;
uint32 canMaxControllerCnt = 0U;
uint32 canDevId, routIntNum = 0U;
+ const Gpt_ChannelConfigType_PC *pChCfgPtr = NULL;
+ const Gpt_ConfigType *pCfgPtr = &GptChannelConfigSet;
+
/*
* 1. Determine the number of timers used
* 2. Build valid timer list
@@ -165,6 +184,265 @@ void CanApp_BuildIntList(void)
CanApp_RoutIntNumbers[idx] = 0U;
}
+ for (idx = 0U; idx < APP_GPT_TOTAL_TIMER_COUNT; idx++)
+ {
+ GptAppStartup_EnaTimer[idx] = 0U;
+ GptAppStartup_IntNumbers[idx] = 0U;
+ GptAppStartup_TimerSrcId[idx] = 0U;
+ }
+
+ for (idx = 0U; idx < pCfgPtr->channelCount; idx++)
+ {
+ pChCfgPtr = &Gpt_ChannelConfig_PC[idx];
+ flag = 0U;
+ routIntNum = 0U;
+ timerDevId = 0U;
+ switch(pChCfgPtr->channelId)
+ {
+#ifdef GptConf_GptChannelConfiguration_MCU_TIMER6
+ case GPT_CH_GPTIMER7:
+ intNum = APP_GPT_MCU_6_INT;
+ pIsrHandler = Gpt_Ch7Isr;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_MCU_TIMER7
+ case GPT_CH_GPTIMER8:
+ intNum = APP_GPT_MCU_7_INT;
+ pIsrHandler = Gpt_Ch8Isr;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_MCU_TIMER8
+ case GPT_CH_GPTIMER9:
+ intNum = APP_GPT_MCU_8_INT;
+ pIsrHandler = Gpt_Ch9Isr;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_MCU_TIMER9
+ case GPT_CH_GPTIMER10:
+ intNum = APP_GPT_MCU_9_INT;
+ pIsrHandler = Gpt_Ch10Isr;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER0
+ case GPT_CH_GPTIMER11:
+ intNum = APP_GPT_0_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_1_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch11Isr;
+ timerDevId = TISCI_DEV_TIMER0;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER1
+ case GPT_CH_GPTIMER12:
+ intNum = APP_GPT_1_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_2_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch12Isr;
+ timerDevId = TISCI_DEV_TIMER1;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER2
+ case GPT_CH_GPTIMER13:
+ intNum = APP_GPT_2_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_3_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch13Isr;
+ timerDevId = TISCI_DEV_TIMER2;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER3
+ case GPT_CH_GPTIMER14:
+ intNum = APP_GPT_3_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_4_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch14Isr;
+ timerDevId = TISCI_DEV_TIMER3;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER4
+ case GPT_CH_GPTIMER15:
+ intNum = APP_GPT_4_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_5_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch15Isr;
+ timerDevId = TISCI_DEV_TIMER4;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER5
+ case GPT_CH_GPTIMER16:
+ intNum = APP_GPT_5_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_6_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch16Isr;
+ timerDevId = TISCI_DEV_TIMER5;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER6
+ case GPT_CH_GPTIMER17:
+ intNum = APP_GPT_6_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_7_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch17Isr;
+ timerDevId = TISCI_DEV_TIMER6;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER7
+ case GPT_CH_GPTIMER18:
+ intNum = APP_GPT_7_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_8_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch18Isr;
+ timerDevId = TISCI_DEV_TIMER7;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER8
+ case GPT_CH_GPTIMER19:
+ intNum = APP_GPT_8_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_9_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch19Isr;
+ timerDevId = TISCI_DEV_TIMER8;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER9
+ case GPT_CH_GPTIMER20:
+ intNum = APP_GPT_9_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_10_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch20Isr;
+ timerDevId = TISCI_DEV_TIMER9;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER10
+ case GPT_CH_GPTIMER21:
+ intNum = APP_GPT_10_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_11_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch21Isr;
+ timerDevId = TISCI_DEV_TIMER10;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER11
+ case GPT_CH_GPTIMER22:
+ intNum = APP_GPT_11_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_12_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch22Isr;
+ timerDevId = TISCI_DEV_TIMER11;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER12
+ case GPT_CH_GPTIMER23:
+ intNum = APP_GPT_12_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_13_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch23Isr;
+ timerDevId = TISCI_DEV_TIMER12;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER13
+ case GPT_CH_GPTIMER24:
+ intNum = APP_GPT_13_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_14_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch24Isr;
+ timerDevId = TISCI_DEV_TIMER13;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER14
+ case GPT_CH_GPTIMER25:
+ intNum = APP_GPT_14_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_15_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch25Isr;
+ timerDevId = TISCI_DEV_TIMER14;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER15
+ case GPT_CH_GPTIMER26:
+ intNum = APP_GPT_15_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_16_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch26Isr;
+ timerDevId = TISCI_DEV_TIMER15;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER16
+ case GPT_CH_GPTIMER27:
+ intNum = APP_GPT_16_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_17_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch27Isr;
+ timerDevId = TISCI_DEV_TIMER16;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER17
+ case GPT_CH_GPTIMER28:
+ intNum = APP_GPT_17_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_18_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch28Isr;
+ timerDevId = TISCI_DEV_TIMER17;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER18
+ case GPT_CH_GPTIMER29:
+ intNum = APP_GPT_18_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_19_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch29Isr;
+ timerDevId = TISCI_DEV_TIMER18;
+ flag = 1U;
+ break;
+#endif
+#ifdef GptConf_GptChannelConfiguration_TIMER19
+ case GPT_CH_GPTIMER30:
+ intNum = APP_GPT_19_INT;
+ routIntNum = INTRTR_CFG_MAIN_DOMAIN_TIMER_20_OUT_INT_NO +
+ INTRTR_CFG_START_LEVEL_INT_NUMBER;
+ pIsrHandler = Gpt_Ch30Isr;
+ timerDevId = TISCI_DEV_TIMER19;
+ flag = 1U;
+ break;
+#endif
+ default:
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: ERROR Interrupt registration is not done for timer ID %d !!!\n", pChCfgPtr->channelId);
+ flag = 0U;
+ break;
+ }
+ if (0U != flag)
+ {
+ GptAppStartup_EnaTimer[pChCfgPtr->channelId] = 1U;
+ GptAppStartup_IntNumbers[pChCfgPtr->channelId] = intNum;
+ GptAppStartup_RoutIntNumbers[pChCfgPtr->channelId] = routIntNum;
+ GptAppStartup_TimerSrcId[pChCfgPtr->channelId] = timerDevId;
+ GptAppStartup_Isr[pChCfgPtr->channelId] = pIsrHandler;
+ flag = 0U;
+ }
+ }
+
for (idx = 0U; idx < canMaxControllerCnt; idx++)
{
flag = 0U;
@@ -208,6 +486,150 @@ void CanApp_BuildIntList(void)
return;
}
+static void GptAppStartup_InterruptConfig(void)
+{
+ uint32 idx;
+ OsalRegisterIntrParams_t intrPrms;
+ OsalInterruptRetCode_e osalRetVal;
+ HwiP_Handle hwiHandle;
+ struct tisci_msg_rm_irq_set_req rmIrqReq;
+ struct tisci_msg_rm_irq_set_resp rmIrqResp;
+ Int32 retVal;
+
+ for (idx = 0U; idx < APP_GPT_TOTAL_TIMER_COUNT; idx++)
+ {
+ if (0U != GptAppStartup_EnaTimer[idx])
+ {
+ if (0U != GptAppStartup_RoutIntNumbers[idx])
+ {
+ /* We will have to use the routed interrupt number
+ subsequently */
+ GptAppStartup_IntNumbers[idx] = GptAppStartup_RoutIntNumbers[idx];
+
+ /* If the timer is not in MCU domain, the interrupt router will
+ have to be configured */
+ /* Set the destination interrupt */
+ rmIrqReq.valid_params = TISCI_MSG_VALUE_RM_DST_ID_VALID;
+ rmIrqReq.valid_params |= TISCI_MSG_VALUE_RM_DST_HOST_IRQ_VALID;
+ rmIrqReq.src_id = GptAppStartup_TimerSrcId[idx];
+ rmIrqReq.global_event = 0U;
+ rmIrqReq.src_index = 0U;
+ rmIrqReq.dst_id = TISCI_DEV_MCU_R5FSS0_CORE0;
+ rmIrqReq.dst_host_irq = GptAppStartup_RoutIntNumbers[idx];
+ rmIrqReq.ia_id = 0U;
+ rmIrqReq.vint = 0U;
+ rmIrqReq.vint_status_bit_index = 0U;
+ rmIrqReq.secondary_host = TISCI_MSG_VALUE_RM_UNUSED_SECONDARY_HOST;
+
+ retVal = Sciclient_rmIrqSet(
+ &rmIrqReq, &rmIrqResp, APP_SCICLIENT_TIMEOUT);
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: rmIrqReq = %d\n",rmIrqReq);
+ // AppUtils_Printf(MSG_NORMAL,APP_NAME ": rmIrqResp = %d\n",rmIrqResp);
+ if(LLD_PASS != retVal)
+ {
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: Error in SciClient Interrupt Params Configuration!!!\n");
+ }
+ }
+ Osal_RegisterInterrupt_initParams(&intrPrms);
+ intrPrms.corepacConfig.arg = (uintptr_t)GptAppStartup_Isr[idx];
+ intrPrms.corepacConfig.isrRoutine = &GptApp_GptXIsr;
+ intrPrms.corepacConfig.priority = 1U;
+ intrPrms.corepacConfig.corepacEventNum = 0U; /* NOT USED ? */
+ intrPrms.corepacConfig.intVecNum = GptAppStartup_IntNumbers[idx];
+
+ osalRetVal = Osal_RegisterInterrupt(&intrPrms, &hwiHandle);
+ if(OSAL_INT_SUCCESS != osalRetVal)
+ {
+ AppUtils_Printf(MSG_NORMAL, "Can_Gpt: Error in OSAL Interrupt Registration !!!\n");
+ break;
+ }
+ }
+ }
+
+ return;
+}
+
+static void GptAppStartup_SetClockSource4Timers(void)
+{
+#ifdef NOT_YET
+/* The MMR has been fire walled, use SciClient to configure the clock source.
+ * Use of Sciclient is not demonstrated in MCAL examples at this point
+ */
+
+ uint32 idx;
+
+ /* Un Lock MMR for MCU control MMR */
+ HW_WR_REG32_RAW(
+ (CSL_MCU_CTRL_MMR0_CFG0_BASE + CSL_MCU_CTRL_MMR_CFG0_LOCK0_KICK0),
+ 0x68EF3490);
+ HW_WR_REG32_RAW(
+ (CSL_MCU_CTRL_MMR0_CFG0_BASE + CSL_MCU_CTRL_MMR_CFG0_LOCK0_KICK1),
+ 0xD172BC5A);
+
+ for (idx = 0U; idx < APP_GPT_TOTAL_TIMER_COUNT; idx++)
+ {
+ if (0U != GptAppStartup_EnaTimer[idx])
+ {
+ if (idx < GPT_CH_GPTIMER5)
+ {
+ /* MCU Timers, 12.5 MHz clock to be sourced */
+ HW_WR_REG32_RAW((CSL_MCU_CTRL_MMR0_CFG0_BASE +
+ CSL_MCU_CTRL_MMR_CFG0_MCU_TIMER0_CLKSEL +
+ (idx * 0x04)),
+ 2U);
+ }
+ }
+ }
+
+#endif
+
+ return;
+}
+
+/** \brief Clear MCU TIMER 0 Timer */
+static void GptAppStartup_ClearAnyOperationalTimers(void)
+{
+ /* MCU Timer 0 is turned on by RBL and interrupts are enabled. We would
+ * require to disable the interrupt and clear MCU timer, to ensure no
+ * un-expected interrupts are received
+ * Steps
+ * 1. Disable the interrupt in MCU TIMER 0
+ * 2. Stop the timer
+ * 3. Enable Soft Reset
+ * 4. Reset the timer
+ * 5. Clear the interrupt in VIM of R5F
+ * 6. Reset the clock source
+ */
+ /* Steps 1 to 2 */
+ HW_WR_REG32_RAW((CSL_MCU_TIMER0_CFG_BASE + TIMER_IRQENABLE_CLR),
+ (TIMER_IRQENABLE_CLR_TCAR_EN_FLAG_MASK |
+ TIMER_IRQENABLE_CLR_OVF_EN_FLAG_MASK |
+ TIMER_IRQENABLE_CLR_MAT_EN_FLAG_MASK));
+ HW_WR_REG32_RAW((CSL_MCU_TIMER0_CFG_BASE + TIMER_TCLR), 0x0U);
+ /* Steps 3 to 4 */
+ HW_WR_REG32_RAW((CSL_MCU_TIMER0_CFG_BASE + TIMER_TSICR),
+ TIMER_TSICR_SFT_MASK);
+ HW_WR_REG32_RAW((CSL_MCU_TIMER0_CFG_BASE + TIMER_TIOCP_CFG),
+ TIMER_TIOCP_CFG_SOFTRESET_MASK);
+
+ /* Step 5 */
+ Intc_IntClrPend(APP_GPT_MCU_0_INT);
+
+ /* Step 6. Reset the clock source also */
+ /* Un Lock */
+ HW_WR_REG32_RAW(
+ (CSL_MCU_CTRL_MMR0_CFG0_BASE + CSL_MCU_CTRL_MMR_CFG0_LOCK0_KICK0),
+ 0x68EF3490);
+ HW_WR_REG32_RAW(
+ (CSL_MCU_CTRL_MMR0_CFG0_BASE + CSL_MCU_CTRL_MMR_CFG0_LOCK0_KICK1),
+ 0xD172BC5A);
+
+ /* Reset Clock source */
+ HW_WR_REG32_RAW((CSL_MCU_CTRL_MMR0_CFG0_BASE +
+ CSL_MCU_CTRL_MMR_CFG0_MCU_TIMER0_CLKSEL),
+ 0U /* Reset Value */);
+}
+
void CanApp_PlatformInit()
{
uint32 regVal = 0U;
diff --git a/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.h b/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.h
index 6686b312..e8f674f3 100755
--- a/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.h
+++ b/mcusw/mcal_drv/mcal/examples/Can/soc/j721s2/mcu1_0/CanApp_Startup.h
@@ -75,9 +75,12 @@
#include "CanIf_Cbk.h"
#include "EcuM_Cbk.h"
#include "Dio.h"
+#include "Gpt.h"
#include "app_utils.h"
+#include <hw_include/hw_types.h>
+#include <hw_include/lldr_timer.h>
#include <hw_include/soc.h>
#include <hw_include/lldr.h>
#include <hw_include/lld_types.h>
@@ -126,9 +129,81 @@
#define APP_MCAN_4_INT0 (CSLR_MAIN2MCU_LVL_INTRTR0_IN_MCAN4_MCANSS_MCAN_LVL_INT_0)
#define APP_MCAN_9_INT0 (CSLR_MAIN2MCU_LVL_INTRTR0_IN_MCAN9_MCANSS_MCAN_LVL_INT_0)
#define APP_MCAN_11_INT0 (CSLR_MAIN2MCU_LVL_INTRTR0_IN_MCAN11_MCANSS_MCAN_LVL_INT_0)
+#define GPTIMER_COUNT_VALUE_6_SEC_INPUT (4026530) ///402653
+#define APP_GPT_TOTAL_TIMER_COUNT (30U)
+
+
+#define APP_GPT_MCU_0_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER0_INTR_PEND_0)
+#define APP_GPT_MCU_1_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER1_INTR_PEND_0)
+#define APP_GPT_MCU_2_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER2_INTR_PEND_0)
+#define APP_GPT_MCU_3_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER3_INTR_PEND_0)
+#define APP_GPT_MCU_4_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER4_INTR_PEND_0)
+#define APP_GPT_MCU_5_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER5_INTR_PEND_0)
+#define APP_GPT_MCU_6_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER6_INTR_PEND_0)
+#define APP_GPT_MCU_7_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER7_INTR_PEND_0)
+#define APP_GPT_MCU_8_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER8_INTR_PEND_0)
+#define APP_GPT_MCU_9_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_TIMER9_INTR_PEND_0)
+#define APP_GPT_0_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER0_INTR_PEND_0)
+#define APP_GPT_1_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER1_INTR_PEND_0)
+#define APP_GPT_2_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER2_INTR_PEND_0)
+#define APP_GPT_3_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER3_INTR_PEND_0)
+#define APP_GPT_4_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER4_INTR_PEND_0)
+#define APP_GPT_5_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER5_INTR_PEND_0)
+#define APP_GPT_6_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER6_INTR_PEND_0)
+#define APP_GPT_7_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER7_INTR_PEND_0)
+#define APP_GPT_8_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER8_INTR_PEND_0)
+#define APP_GPT_9_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER9_INTR_PEND_0)
+#define APP_GPT_10_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER10_INTR_PEND_0)
+#define APP_GPT_11_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER11_INTR_PEND_0)
+#define APP_GPT_12_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER12_INTR_PEND_0)
+#define APP_GPT_13_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER13_INTR_PEND_0)
+#define APP_GPT_14_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER14_INTR_PEND_0)
+#define APP_GPT_15_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER15_INTR_PEND_0)
+#define APP_GPT_16_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER16_INTR_PEND_0)
+#define APP_GPT_17_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER17_INTR_PEND_0)
+#define APP_GPT_18_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER18_INTR_PEND_0)
+#define APP_GPT_19_INT (CSLR_MAIN2MCU_LVL_INTRTR0_IN_TIMER19_INTR_PEND_0)
+
+typedef union
+{
+ uint64 U64;
+ uint32 U32[2];
+ uint16 U16[4];
+ uint8 U08[8];
+
+ struct
+ {
+ uint8 APA_Rq_EPS_Ctrl :1;
+ uint8 APA_V_Rq_EPS_Ctrl :1;
+ uint8 ResBits00 :6;
+
+ uint8 APA_Angle_Target_0;
+ uint8 APA_Angle_Target_1;
+ uint8 ResByte3;
+ uint8 ResByte4;
+
+ uint8 APA_checksum :4;
+ uint8 APA_Roll_Count :4;
+
+ uint8 ResByte6;
+ uint8 ResByte7;
+ } Bits;
+
+} TU_APA1_MSG;
+
+struct {
+ struct {
+ struct {
+ uint8 Valid;
+ uint8 Apply;
+ uint16 Value;
+ } Angle;
+ } TX;
+} bcanData;
void CanApp_CanXIsr(uintptr_t CanPtr);
typedef void (*CanApp_IsrType)(void);
+typedef void (*GptApp_IsrType)(void);
/* ========================================================================== */
/* Internal Function Declarations */
@@ -143,4 +218,7 @@ void SetupI2CTransfer(I2C_Handle handle, uint32 slaveAddr,
uint8 *writeData, uint32 numWriteBytes,
uint8 *readData, uint32 numReadBytes);
void CanApp_SetupCanFrame(uint32 ctlr_cnt, uint8 *hth, uint32 *mask);
+#if defined (SOC_J721E) || (SOC_J7200) || (SOC_J721S2) || defined (SOC_J784S4) || defined (SOC_J742S2)
+void GptApp_GptXIsr(uintptr_t GptPtr);
+#endif
#endif /* CANAPP_STARTUP_H_ */
diff --git a/mcusw/mcal_drv/mcal/examples_config/Can_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Can_Cfg.c b/mcusw/mcal_drv/mcal/examples_config/Can_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Can_Cfg.c
index c24e93e0..e9c47f5f 100644
--- a/mcusw/mcal_drv/mcal/examples_config/Can_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Can_Cfg.c
+++ b/mcusw/mcal_drv/mcal/examples_config/Can_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Can_Cfg.c
@@ -97,13 +97,13 @@
static Can_BaudConfigType
CanConfigSet_CanController_0_CanControllerBaudrateConfig_0 =
{
- 1000U, /* in Kbps */
+ 500U, /* in Kbps */
8U, /* Prop Segement value */
6U, /* Phase Segment 1 */
5U, /* Phase Segment 2 */
1U, /* Sync jump width */
20U, /* Sum of all timing parameters */
- 4U, /* Controller BRP value for Baud */
+ 8U, /* Controller BRP value for Baud */
/* Data phase Baudrate */
{
5000U, /* in Kbps */
@@ -114,7 +114,7 @@ static Can_BaudConfigType
5U, /* Sum of all timing parameters */
4U, /* Controller BRP value for Baud */
180U, /* Specifies the Transceiver Delay Compensation Offset in ns */
- (boolean)TRUE, /* Specifies if the bit rate switching shall be used */
+ (boolean)FALSE, /* Specifies if the bit rate switching shall be used */
}
};
static Can_BaudConfigType
@@ -221,7 +221,7 @@ const struct Can_ControllerStruct_PC
CAN_CONTROLLER_INSTANCE_MCU_MCAN0, /* Controller Instance */
- (boolean)TRUE, /* CAN FD Mode Enable */
+ (boolean)FALSE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_1 =
@@ -237,7 +237,7 @@ const struct Can_ControllerStruct_PC
CAN_CONTROLLER_INSTANCE_MCU_MCAN1, /* Controller Instance */
- (boolean)TRUE, /* CAN FD Mode Enable */
+ (boolean)FALSE, /* CAN FD Mode Enable */
};
const struct Can_ControllerStruct_PC
CanConfigSet_PC_CanController_2 =
@@ -253,7 +253,7 @@ const struct Can_ControllerStruct_PC
CAN_CONTROLLER_INSTANCE_MCAN0, /* Controller Instance */
- (boolean)TRUE, /* CAN FD Mode Enable */
+ (boolean)FALSE, /* CAN FD Mode Enable */
};
@@ -350,7 +350,7 @@ static Can_MailboxType
&CanConfigSet_PC_CanController_0, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
- 204U, /* Padding value for CAN FD message */
+ 0U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
@@ -367,7 +367,7 @@ static Can_MailboxType
&CanConfigSet_PC_CanController_0, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
- 204U, /* Padding value for CAN FD message */
+ 0U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
@@ -384,7 +384,7 @@ static Can_MailboxType
&CanConfigSet_PC_CanController_1, /* Controller */
NULL_PTR, /* List of HW Filter structs */
0U, /* Hw Filter Count */
- 204U, /* Padding value for CAN FD message */
+ 0U, /* Padding value for CAN FD message */
(boolean)FALSE, /* CanHardwareObjectUsesPolling */
};
diff --git a/mcusw/mcal_drv/mcal/examples_config/Gpt_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Gpt_PBcfg.c b/mcusw/mcal_drv/mcal/examples_config/Gpt_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Gpt_PBcfg.c
index 762d7300..70c1cc2e 100644
--- a/mcusw/mcal_drv/mcal/examples_config/Gpt_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Gpt_PBcfg.c
+++ b/mcusw/mcal_drv/mcal/examples_config/Gpt_Demo_Cfg/output/generated/soc/j721s2/mcu1_0/src/Gpt_PBcfg.c
@@ -117,11 +117,11 @@ static CONST(Gpt_ChannelConfigType, GPT_CONFIG_DATA)
[0U] =
{
- .channelMode = (GPT_CH_MODE_ONESHOT),
+ .channelMode = (GPT_CH_MODE_CONTINUOUS),
/**< Gpt Channel Mode */
.tickValueMax = 0xf0000000U,
/**< Max Channel Tick Value */
- .enableWakeupFlag = (uint8) TRUE,
+ .enableWakeupFlag = (uint8) FALSE,
/**< Wakeup Enable Flag */
.fnPtrNotifyFunction = Gpt_Channel_Notify12,
/**< Notification Call Back function */
log:
CAN_APP: Sample Application - STARTS !!!
CAN_APP: Variant - Pre Compile being used !!!
Can_Gpt: rmIrqReq = 2
Can_Gpt: rmIrqReq = 2
Can_Gpt: rmIrqReq = 2
CAN_APP: Successfully Enabled CAN Transceiver MCU MCAN0!!!
CAN_APP: Successfully Enabled CAN Transceiver MCU MCAN1!!!
Can_Gpt: Enabled notification for channel [6]
Can_Gpt: Started Timer Channel [6]
CCS screenshot:
CAN sent message:
Many thanks!!
Alice