Part Number: TDA4VH-Q1
Tool/software:
I am referring the link TDA4VH-Q1: Enabling MAIN_MCAN5 for Linux on EVM. I followed those steps, but unfortunately still I can not receive the data from MCAN5 and MCAN3.
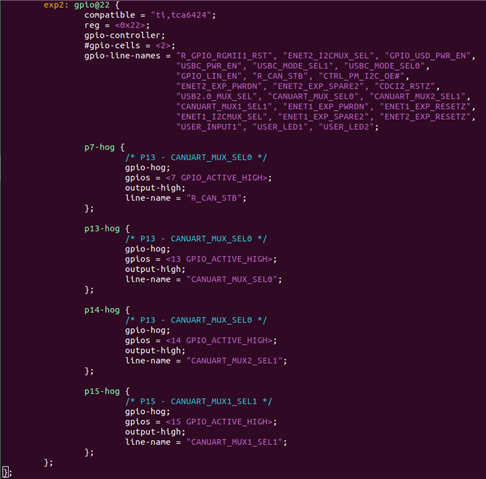
I am outputting high the AUDIO_MUX_SEL on exp1, similarly for making B2 lines are outputted, enabled all signals into high in exp2.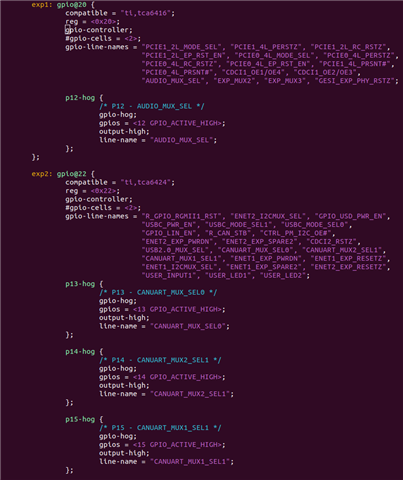
Enabled the status of MCAN5 and MCAN3 as okay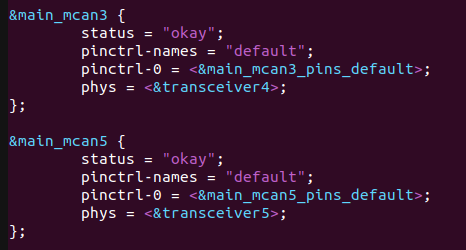
At the same time disabled mcasp0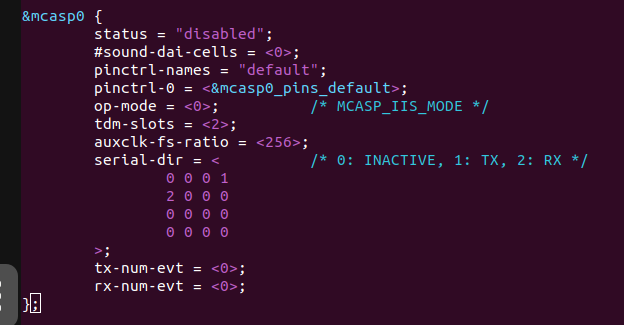
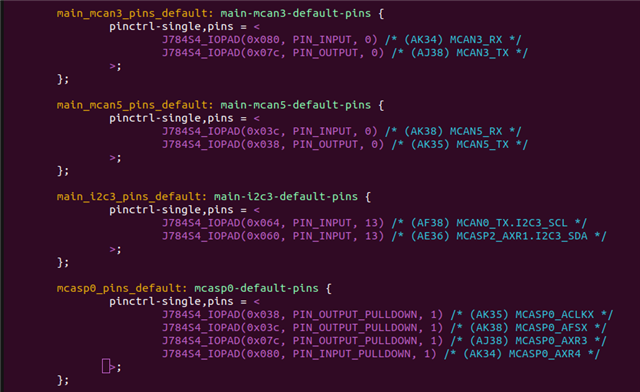
Pin controls are added in &main_pmx0
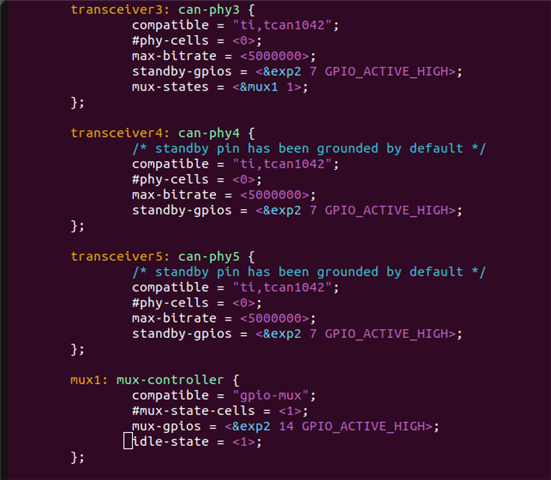
configured transceiver4 and 5 for MCAN3 and MCAN5 respectively.
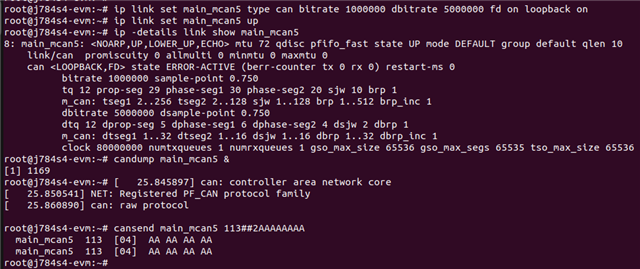
I can bring the interfaces up in the board and I can see the interface name 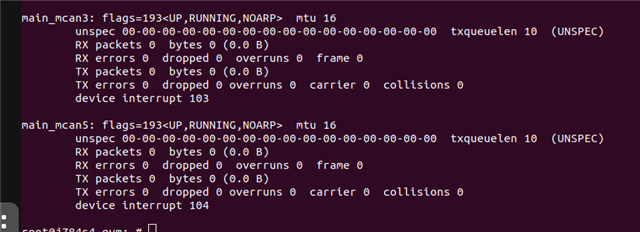
but, unable to receive the data from any other devices.
the logs are 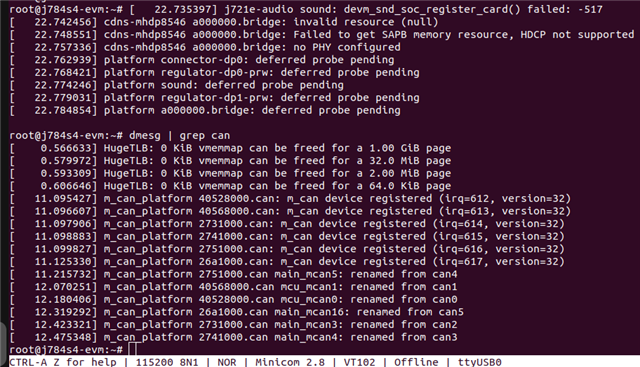
Am I missing something? Do I have to enable/disable more ?
I would like to get the the support for resolving this issue. I got stuck in it. Please support on this.
Thanks in advance.